ZIL-135Sh
Por muitos anos, o Escritório de Design Especial da Fábrica recebeu o nome de I.A. O Likhacheva desenvolveu projetos para veículos cross-country ultra-altos. O principal cliente desses veículos era o Ministério da Defesa, mas a partir de um certo momento outros departamentos começaram a desempenhar esse papel. Assim, no início dos anos sessenta, começou a cooperação entre a SKB ZIL e as empresas do setor espacial. Um de seus resultados mais interessantes foi o experiente veículo todo-o-terreno ZIL-135Sh.
Em meados dos anos sessenta, o programa espacial soviético enfrentou certas dificuldades logísticas. Foguetes espaciais foram construídos na fábrica Progress em Kuibyshev (atual Samara), após o qual foram transportados desmontados por ferrovia para o Cosmódromo de Baikonur, onde foram finalmente montados e preparados para o lançamento. Embora se tratasse de veículos de lançamento baseados na plataforma R-7, esses métodos pareciam aceitáveis. No entanto, o desenvolvimento do foguete N-1 "lunar", que se distinguia pelo aumento de dimensões, já estava em andamento. A entrega de suas unidades ao espaçoporto estava associada a sérios problemas. O protótipo ZIL-135Sh no aterro. Foto Russian-power.rf
O protótipo ZIL-135Sh no aterro. Foto Russian-power.rf
Em meados dos anos sessenta, o programa espacial soviético enfrentou certas dificuldades logísticas. Foguetes espaciais foram construídos na fábrica Progress em Kuibyshev (atual Samara), após o qual foram transportados desmontados por ferrovia para o Cosmódromo de Baikonur, onde foram finalmente montados e preparados para o lançamento. Embora se tratasse de veículos de lançamento baseados na plataforma R-7, esses métodos pareciam aceitáveis. No entanto, o desenvolvimento do foguete N-1 "lunar", que se distinguia pelo aumento de dimensões, já estava em andamento. A entrega de suas unidades ao espaçoporto estava associada a sérios problemas.
O protótipo ZIL-135Sh no aterro. Foto Russian-power.rfConsiderando alternativas ao transporte ferroviário, os especialistas do OKB-1, liderados por S.P. Foi oferecida a Korolev uma versão original da entrega de conjuntos de mísseis a Baikonur. Foram propostas etapas para serem construídas em Kuibyshev, após o que deveriam ser transportadas em uma barcaça especial ao longo do Volga e no Mar Cáspio até a cidade de Guryev (atual cidade de Atyrau, Cazaquistão). Lá, planejava-se recarregar foguetes em veículos especiais e entregá-los por terra ao cosmódromo. Para implementar tal proposta, foi necessário criar uma barcaça fluvial e um veículo terrestre com características aceitáveis. No caso do transporte terrestre, a tarefa dos projetistas era complicada pelo fato de que unidades individuais do futuro N-1 podiam pesar pelo menos 20 a 25 toneladas.
Um grupo de engenheiros do OKB-1 liderado por V.P. Petrov formou uma aparência aproximada do futuro transportador e fez várias propostas importantes. Portanto, para garantir mobilidade e manobrabilidade aceitáveis, a máquina precisava de rodas orientáveis semelhantes ao tipo de chassi da aeronave usado nas cremalheiras. Ao mesmo tempo, as características desejadas de permeabilidade e mobilidade nas estepes do SSR do Cazaquistão só podiam ser obtidas com o uso de rodas com diâmetro de pelo menos 1,5 m. Tendo esse chassi, o futuro transportador poderia obter tamanhos aceitáveis e mostrar a capacidade de carga desejada.
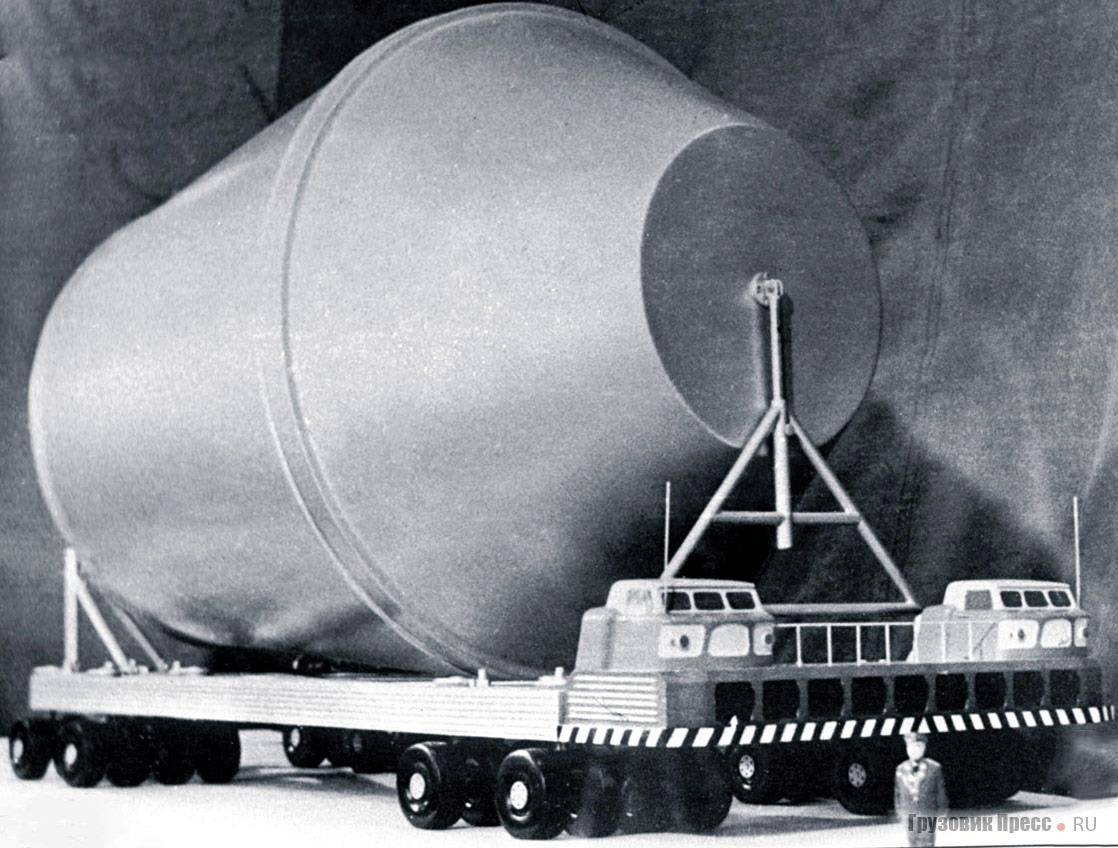
Layout do futuro transportador de tamanho completo com uma carga útil. Foto de Gruzovikpress.ru
Tendo formado uma visão aproximada do futuro transportador de foguetes, o OKB-1 começou a procurar o desenvolvedor de um projeto completo. Várias fábricas de automóveis domésticas tiveram a experiência necessária de uma só vez, mas nem todas ficaram entusiasmadas com a proposta dos designers de "espaço". Portanto, o Instituto NAMI e a fábrica de automóveis de Minsk não ousaram participar de um projeto tão complexo, cujo desenvolvimento, além disso, não foi alocado muito tempo.
A situação foi salva pela SKB ZIL liderada por V.A. Grachev. Em uma reunião dedicada ao desenvolvimento de um novo veículo, ele expressou sua disposição em criar um veículo especial capaz de transportar mercadorias de até 100 toneladas em terrenos acidentados - quatro vezes a carga necessária. Cálculos simples mostraram que um veículo todo-o-terreno promissor será capaz de transportar totalmente o segundo ou terceiro estágio do foguete N-1. O primeiro estágio maior e mais pesado poderia ser desmontado em apenas três seções.
Assim, para transportar todos os elementos do foguete para Baikonur, foram necessários apenas cinco a seis vôos do transportador, após o que foi possível começar a montar o foguete. No caso do transporte ferroviário, era necessário um trem inteiro e a montagem levaria muito mais tempo.
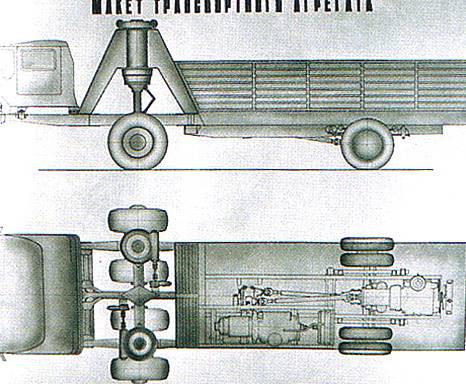
O esquema do ZIL-135Sh experimental. Figura Russian-power.rf
Logo apareceu uma série de documentos que lançavam oficialmente o novo projeto. A SKB ZIL foi nomeada desenvolvedora líder do transportador para a indústria espacial. O projeto de sistemas elétricos especiais foi confiado à SKB da planta de Moscou nº 467, em homenagem a F.E. Dzerzhinsky. O OKB-1 realizou a preparação de especificações técnicas, coordenação do trabalho e assistência administrativa.
No início de 1967, várias empresas formaram conjuntamente a imagem do futuro transportador. Foi proposto construir uma máquina com uma área de carga de 10,8x21,1 m de tamanho.O chassi deve ter uma estrutura de oito eixos com um arranjo de rodas de 32x32. As rodas foram propostas para serem instaladas em pares em racks rotativos. Quatro desses racks foram colocados em cada canto do casco. Devido a esse design de chassi, foi possível fornecer a maior capacidade de manobra. A massa total chegaria a 80-100 toneladas com uma carga útil das 100 toneladas prometidas.
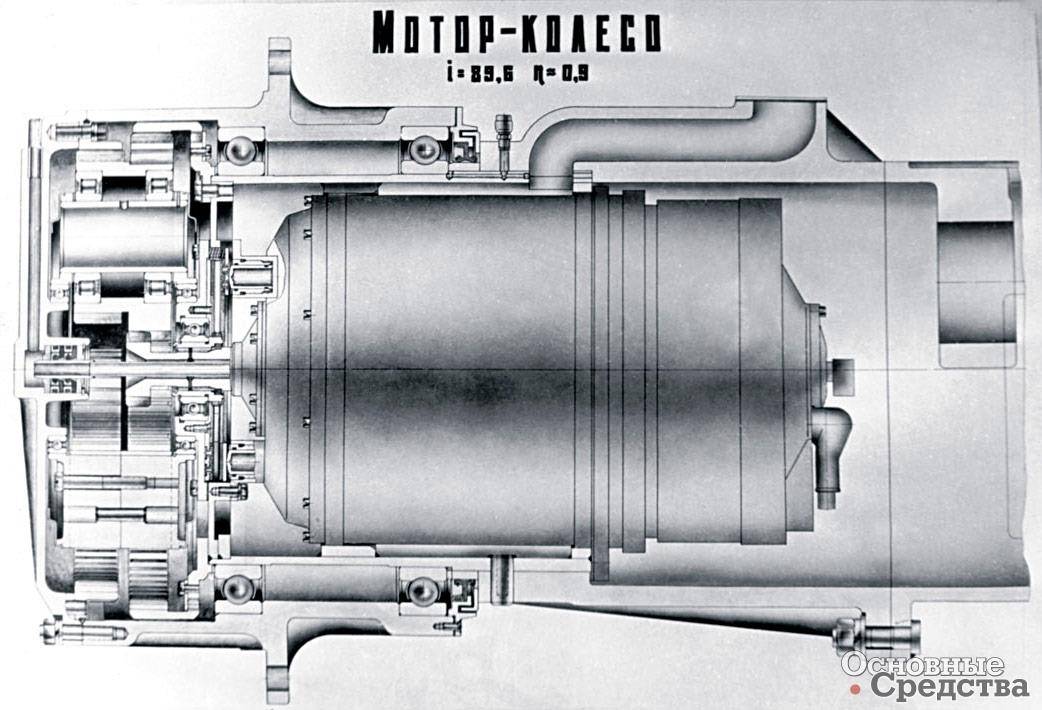
O esquema da roda do motor com o motor DT-15M. Figura Os1.ru
Obviamente, a construção de um transportador experimental em configuração completa ainda não fez sentido. Antes de desenvolver um projeto completo, foi proposto criar, construir e testar um protótipo em uma configuração simplificada. Do ponto de vista do chassi, este carro deveria ser um oitavo de uma transportadora de tamanho normal. Usando o equipamento reduzido, foi possível verificar as idéias e soluções básicas, bem como tirar certas conclusões e fazer alterações no projeto existente.
Foi proposto criar um protótipo usando unidades e montagens prontas. As principais fontes de componentes deveriam ser veículos todo-o-terreno da família ZIL-135. Por exemplo, a transmissão elétrica foi baseada nas unidades do veículo todo-o-terreno ZIL-135E. A este respeito, a máquina experimental foi designada como ZIL-135Sh ("Chassis"). A designação ZIL-135MSh também é encontrada. Note-se que algumas unidades foram emprestadas da aeronave Il-18, mas esse fato não se refletiu no nome do projeto.
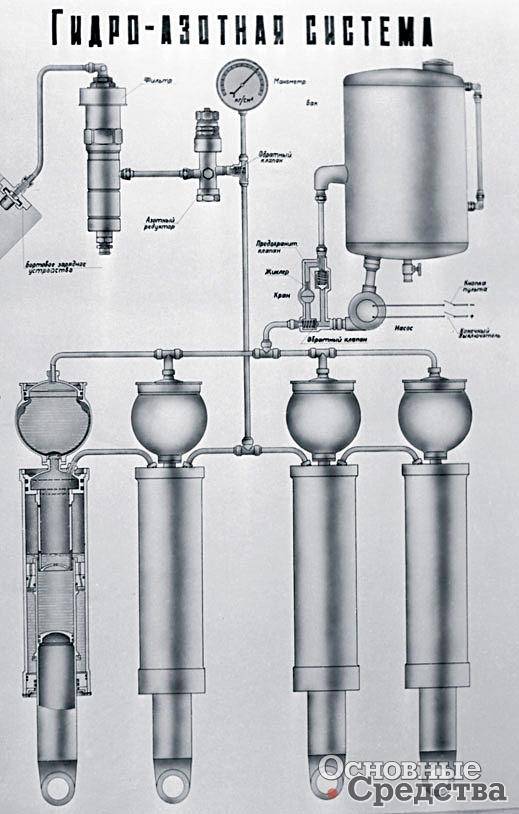
Esquema do sistema hidropneumático da máquina. Figura Os1.ru
O projeto ZIL-135Sh propôs a construção de um laboratório de autopropulsão com um design incomum, que apresenta as diferenças mais sérias em relação a outros veículos de cross-country ultra-alto. Recursos especiais estavam presentes na usina ou na transmissão e no design do chassi. Em particular, o último deveria combinar agregados tradicionais e elementos do futuro transportador "espacial".
A base da máquina experimental era uma estrutura de forma complexa. Suas partes frontal e traseira eram retangulares. Entre eles, logo atrás da cabine, estavam os membros laterais longitudinais do perfil em forma de L. Eles foram projetados para a instalação de elementos especiais do chassi. A saliência frontal do quadro foi proposta para ser usada na instalação da cabine e, na parte traseira, foram colocados elementos de duas usinas de energia ao mesmo tempo. Também foi localizado um corpo para transportar vários bens ou propriedades.
A usina elétrica ZIL-135Sh consistia em dois motores ZIL-375Y com potência de 375 hp cada. O primeiro motor estava localizado no conjunto da estrutura traseira, em frente a ele. Na parte traseira da plataforma, diretamente acima do eixo da roda, um segundo motor foi colocado. O motor dianteiro estava conectado a um gerador elétrico GET-120 de 120 kW, que era a base da transmissão elétrica. O segundo motor foi equipado com uma transmissão hidromecânica associada ao eixo traseiro. Conforme concebido pelos projetistas, o motor principal era o dianteiro, que fazia parte da unidade elétrico-gás. O segundo motor foi planejado para ser usado em algumas situações para aumentar a potência geral da máquina.
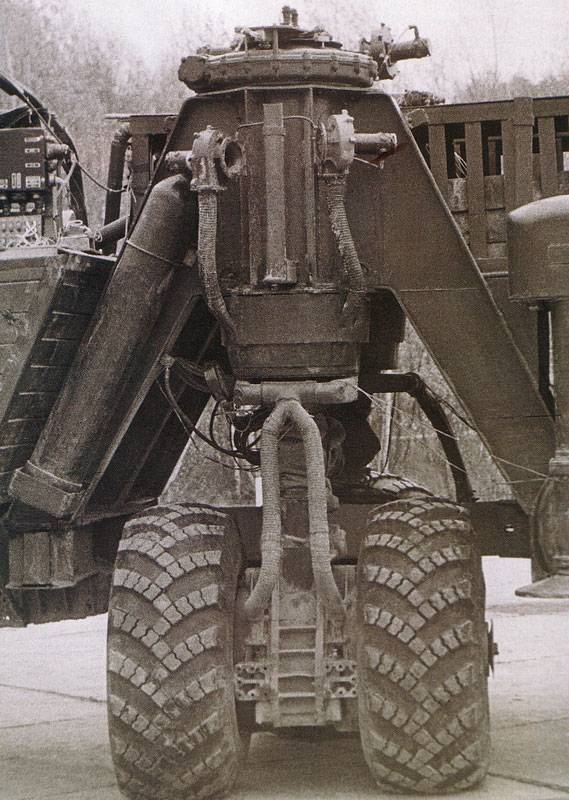
Suporte da roda direita. Foto Os1.ru
O equipamento, que foi o principal elemento de todo o projeto experimental, foi suspenso nos membros laterais da estrutura em forma de L. Em suportes verticais especiais foram colocados dois racks, construídos com base nas unidades da aeronave Il-18. Havia um suporte vertical que servia como amortecedor hidropneumático com curso de 450 mm. Acionamentos elétricos foram montados nos membros laterais, com os quais o rack podia girar em torno de um eixo vertical, proporcionando manobras. Na parte inferior dos braços havia um par de rodas motorizadas.
A fábrica nº 476 desenvolveu um sistema de rastreamento de rastreamento síncrono original para gerenciar os movimentos do rack. O sistema de controle tornou possível girar o rack até 90 ° para a direita e esquerda usando dois modos, de acordo com a lei do trapézio ou paralelogramo da direção. Também foi possível taxiar em um setor de 20 ° de largura. O modo de operação dos controles foi selecionado pelo motorista. O volante foi convertido em comandos para os acionamentos por um dispositivo analógico especial, que recebeu dados de vários sensores e emitiu sinais para os atuadores. Tais algoritmos foram implementados pela primeira vez na prática doméstica.
Um par de rodas de motor foi montado em um suporte comum na parte inferior do rack. O cubo de cada um deles continha um motor de 15 kW DC DT-15M, conectado a uma caixa de engrenagens planetária de estágio único. As rodas foram equipadas com pneus do tamanho 1200x500x580 mm com um piso desenvolvido. Todas as quatro rodas dos suportes dianteiros tinham um sistema de controle de pressão centralizado. A pressão dos pneus variou de 1 a 3 kg / m².

Sistema de controle de rotação do rack. Foto Os1.ru
Dois racks rotativos de duas rodas foram complementados com um eixo traseiro, necessário para apoiar o chassi na posição correta. Uma ponte com rodas de duas águas estava suspensa em molas longitudinais. Usando transmissão hidromecânica, a potência do motor "traseiro" era transmitida às rodas do eixo traseiro.
Devido ao design especial do chassi, a fórmula da roda do protótipo ZIL-135Sh pode ser descrita como 6x6 / 4 ou 4x4 + 2x2. Todas as seis rodas do carro estavam dirigindo, mas a tração das duas rodas traseiras podia ser desconectada. Das 6 rodas, 4 foram controladas e giraram juntas com seus racks.
Para alguns testes, o protótipo ZIL-135Sh foi equipado com macacos hidráulicos. Um par desses dispositivos foi instalado nas laterais da frente do chassi, diretamente atrás da cabine. Com a ajuda de macacos, foi possível pendurar a parte frontal da máquina, alterando a carga nas rodas dos racks giratórios.
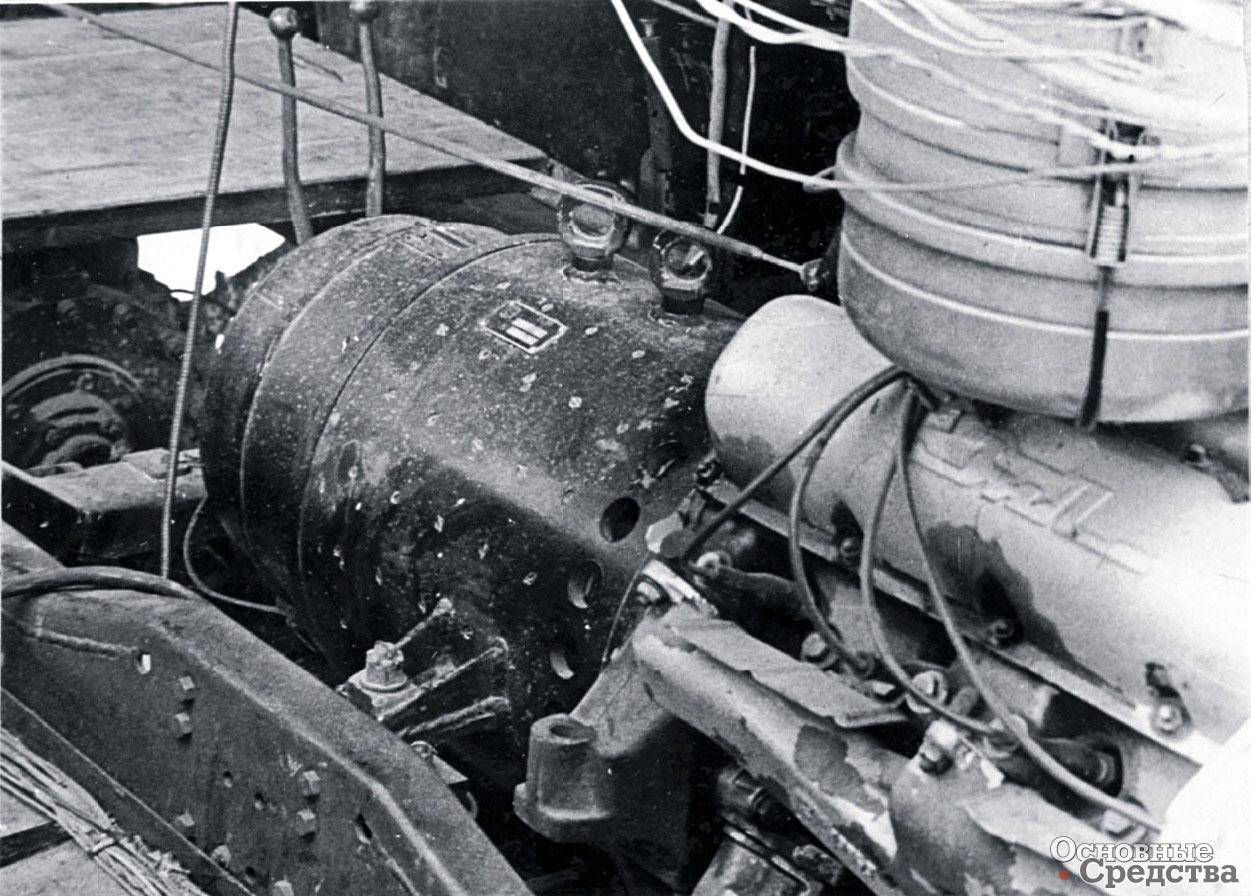
A usina. No centro está o gerador GET-120, à direita, você pode ver o motor ZIL-375 conectado ao eixo traseiro. Foto Os1.ru
A saliência frontal da estrutura serviu de base para a cabine, emprestada do carro ZIL-135K. Era uma unidade de fibra de vidro com quatro assentos e uma vista circular usando vidros de grandes áreas. Em conexão com o uso de duas usinas autônomas com diferentes opções de transmissão, a cabine recebeu um conjunto especial de controles. Uma blindagem adicional com controles para sistemas elétricos, que se distinguia por grandes dimensões, tinha que ser instalada na frente da estação de trabalho da cabine direita. Notável por sua alta complexidade, esse posto de controle duplo forneceu controle total sobre todos os sistemas.
Um corpo lateral largo foi instalado acima do compartimento do motor formado pela parte traseira do chassi. Uma área de carga de madeira com laterais de altura média recebeu arcos para a instalação de um toldo. Outro arco foi localizado atrás do cockpit e tornou possível cobrir os membros laterais com prateleiras rotativas com lona. Nas laterais do corpo havia portas com degraus para o pouso. Segundo relatos, durante os testes, o corpo foi usado para transportar lastro e várias peças de material necessárias para o teste dos equipamentos.
O protótipo ZIL-135Sh tinha um comprimento inferior a 9,5 m. A largura atingiu 3,66 m, altura - 3,1 m. O peso-meio-fio foi de 12,9 toneladas. A capacidade de carga nominal foi de 12 toneladas, mas toda essa carga deveria ter sido apenas o eixo dianteiro formado por um par de racks de duas rodas. A distância entre eixos do protótipo é de 4,46 m. A pista do eixo dianteiro, no centro dos suportes, era de 2 m, no centro das rodas extremas - cerca de uma vez e meia mais. Eixo traseiro da esteira - 1,79 m.

Painel de controle para equipamentos elétricos. Foto de Gruzovikpress.ru
Uma máquina experimental de um novo tipo, que demonstrava a principal tecnologia do futuro transportador "espacial", foi construída no início do verão de 1967 com o uso máximo de componentes acabados. No final de junho, o carro foi entregue no campo de treinamento do 21º Instituto de Pesquisa do Ministério da Defesa, na cidade de Bronnitsy. Nos meses seguintes, o protótipo funcionou no campo de treinamento e mostrou sua capacidade em condições próximas às estepes do SSR cazaque. Resultados altos foram obtidos e todos os novos componentes da máquina se mostraram bem.
Movendo-se pela estrada, o ZIL-135Sh acelerou para 60 km / h. A velocidade média em uma boa estrada era metade disso. Em estradas de terra e prados, era possível atingir velocidades de até 20 km / h, em lavra - até 10 km / h. Durante o teste, o carro passou cerca de 1000 km em diferentes superfícies e solos. Em todas as superfícies, incluindo aquelas com baixa capacidade de carga, o veículo todo-o-terreno estava confiante. Verificou-se que esse transportador poderá desempenhar adequadamente suas funções nas áreas de operação pretendidas.
Um dos objetivos dos testes era verificar o sistema de direção automática original das rodas dianteiras. Por toda a sua complexidade e riscos esperados, esse equipamento lidou com as tarefas que lhe foram atribuídas. A automação executou corretamente os comandos do volante e forneceu as manobras necessárias em todas as condições. Ao girar as rodas de direção em 90 °, foi possível obter um raio de viragem mínimo (ao longo da roda externa) de 5,1 M. A máquina realmente girou em torno de seu eixo traseiro.

O ZIL-135Sh demonstra a capacidade de girar as rodas 90 °. Foto Denisovets.ru
Os testes do protótipo ZIL-135Sh foram bem-sucedidos. Todas as principais tecnologias deste projeto podem ser usadas para criar um transportador de tamanho completo para a tecnologia de foguetes. Mesmo antes de os testes do veículo experimental todo-o-terreno serem concluídos, foram iniciados os trabalhos de desenvolvimento sobre o tópico de um veículo de transporte completo. Num futuro previsível, o ZIL Design Bureau prepararia toda a documentação necessária e começaria os preparativos para a construção de um protótipo.
Paralelamente à criação do novo transportador, foi realizado o projeto do foguete N-1 "lunar". O novo chefe do programa espacial V.P. Mishin a partir de certo momento começou a duvidar da necessidade de implantar um novo sistema de logística para a entrega de mísseis a Baikonur. Com todas as suas vantagens, o transporte de conjuntos de mísseis ao longo de semi-desertos e estepes foi associado a sérias dificuldades e riscos. Além disso, o projeto do transportador era muito caro e complicado em termos de produção e operação subseqüente.
No final de 1967, logo após a conclusão dos testes do protótipo ZIL-135Sh, uma decisão foi tomada em princípio para recusar novos veículos de aparência incomum. O OKB-1 cancelou um pedido para criar um transportador especial de oito eixos. Elementos de mísseis ainda foram propostos para serem transportados por via férrea. Foi assim que eles finalmente garantiram a entrega de conjuntos de mísseis N-1.

O modelo da tábua de pão gira em torno de seu próprio eixo. Foto Russian-power.rf
Depois que os testes foram concluídos e o projeto foi fechado, o único protótipo ZIL-135Sh provavelmente foi enviado para armazenamento. Seu destino adicional é desconhecido. As informações sobre sua existência não estão disponíveis no momento. Talvez em algum momento tenha sido desmontado como desnecessário. Nos museus domésticos, existem vários veículos todo-o-terreno experientes e exclusivos desenvolvidos pela SKB Plant Likhachev, mas o carro ZIL-135Sh não está entre eles.
No momento da interrupção do trabalho, o projeto de transportador em tamanho real nunca foi concluído. Mais tarde, em meados dos anos 70, surgiu a questão de criar um transportador extra pesado para a tecnologia de foguetes e espaço, mas eles decidiram atribuir a tarefa de transportar grandes cargas para aeronaves especialmente equipadas. Desenvolvimentos em chassis terrestres especiais novamente não puderam se aproximar da aplicação prática.
O protótipo original atendeu às expectativas, mas o cliente decidiu abandonar o projeto principal do transportador superpesado. Como resultado, o tópico ZIL-135Sh não foi desenvolvido e os desenvolvimentos sobre ele realmente permaneceram não reclamados. No entanto, este carro deixou para trás alguns títulos interessantes. O protótipo ZIL-135Sh permaneceu na históriacomo um dos carros experimentais mais interessantes da história da indústria automotiva doméstica. Além disso, foi o último veículo todo-o-terreno de oito rodas sob a marca ZIL. Todos os seguintes veículos de cross-country da SKB ZIL foram equipados com um chassi triaxial.
De acordo com os materiais:
http://denisovets.ru/
https://drive2.ru/
https://os1.ru/
http://gruzovikpress.ru/
http: // Russian-force.rf /
Kochnev E.D. Carros secretos do exército soviético. - M.: Yauza, Eksmo, 2011.
Nenhum comentário:
Postar um comentário
Observação: somente um membro deste blog pode postar um comentário.