Calculadora de torpedos T. Vh. Ré. S3
O coração do sistema de controle de tiro de torpedo era a calculadora de torpedo designada T. Vh. Ré. S3, fabricado pela Siemens Company. Era um dispositivo eletromecânico que foi projetado para resolver dois problemas:
- Calculando o ângulo de deflexão β e convertendo o seu valor no ângulo do giroscópio ρ (tendo em conta a correção de paralaxe δ, resultante da diferente localização do dispositivo de mira do torpedo e do tubo do torpedo, bem como a correção resultante do giro do torpedo após deixar o tubo);
- Cálculo do ângulo de dispersão da salva de torpedos ψ.
O desenvolvimento desta calculadora começou por volta do ano de 1939. Em 1941 foi (juntamente com todo o sistema de controle de fogo de torpedo) entregue à Kriegsmarine para testes. No mesmo ano – depois de passar com sucesso em todos os testes – as calculadoras recém-fabricadas foram instaladas nos U-Boats da frente.
A partir de 1941, quando a calculadora entrou em serviço, até o fim da guerra, houve algumas modificações em sua construção.
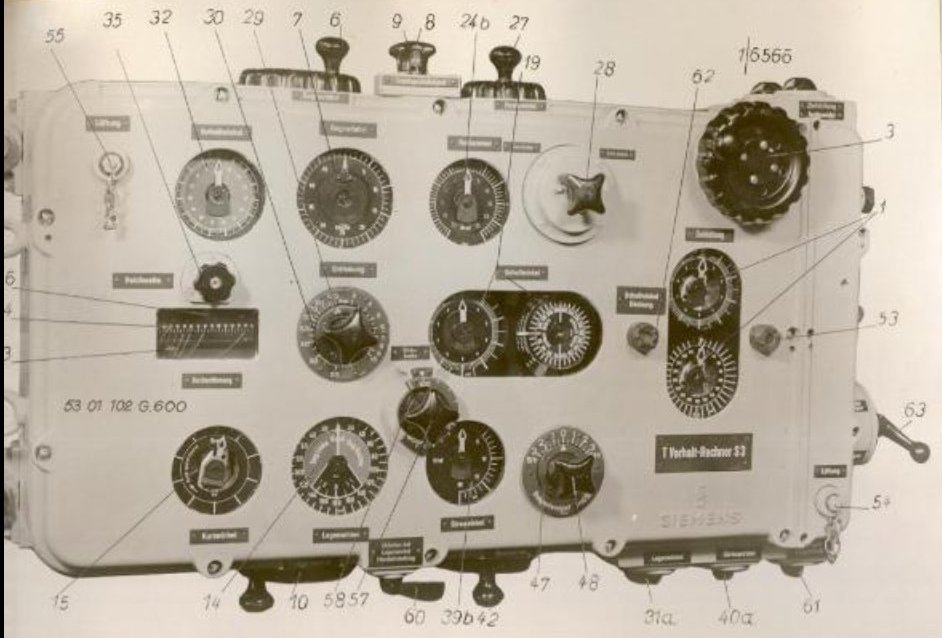
Foto 1. A calculadora de torpedos T. Vh. Ré. S3 – versão inicial – vista da capa
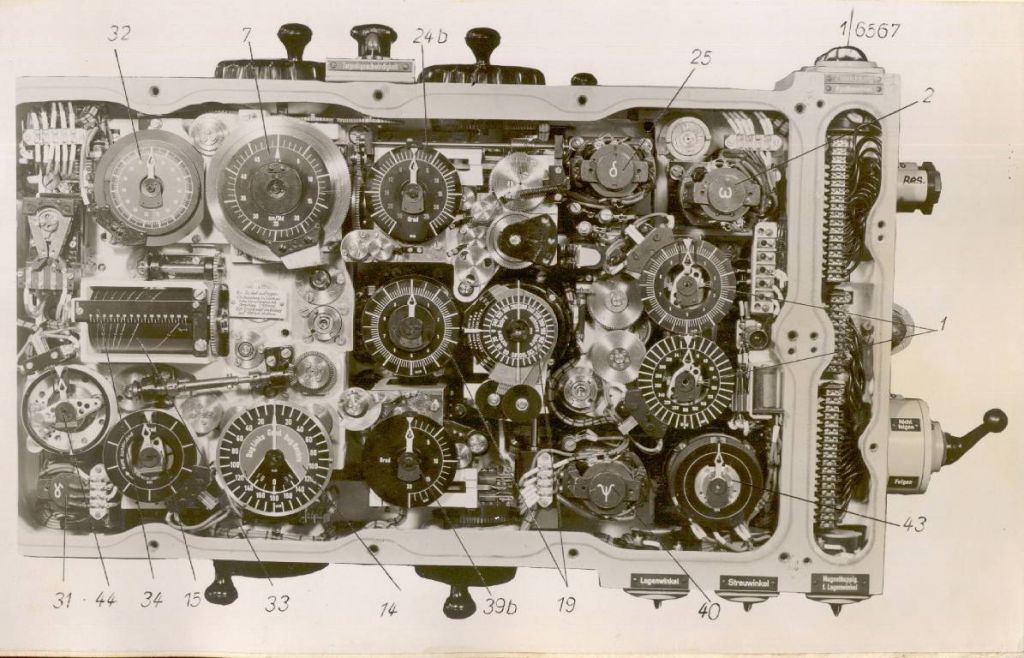
Foto 2. A calculadora de torpedos T. Vh. Ré. S3 – versão inicial – vista após a remoção da tampa frontal
A calculadora foi colocada em uma caixa de aço, com cerca de 106 cm x 45 cm x 13 cm. Localizava-se nas torres de comando dos U-Boats (exceto os U-Boats tipo II - por falta de espaço na torre de comando, foi instalado na sala de controle) – a estibordo no caso do tipo VII barcos e a bombordo no caso dos barcos dos tipos IX e XXI. Nos U-Boats tipo VII foi instalado horizontalmente, enquanto nos U-Boats tipo II, IX e XXI – verticalmente.
No modo de operação padrão, depois de inserir os dados do alvo por meio dos botões, a calculadora (levando em consideração o rumo do alvo atual transmitido do periscópio/UZO e o próprio curso recebido da girobússola) calculou automaticamente a solução do triângulo de torpedo e o ângulo de propagação da salva de torpedos. Em caso de danos em alguns componentes da calculadora ou falha dos sistemas elétricos, era possível operar a calculadora no modo manual.
A calculadora de torpedos consistia nos seguintes componentes:
- componente para resolver o triângulo de torpedo;
- componente para cálculo da correção de paralaxe;
- componente para cálculo do ângulo do giroscópio;
- componente para cálculo da distância máxima ao alvo no momento do lançamento do torpedo;
- componente para cálculo do ângulo de dispersão da salva torpedo;
- componente para entrar no rolamento alvo;
- componente para calcular o ângulo atual na proa;
- componente para calcular o rumo alvo atual;

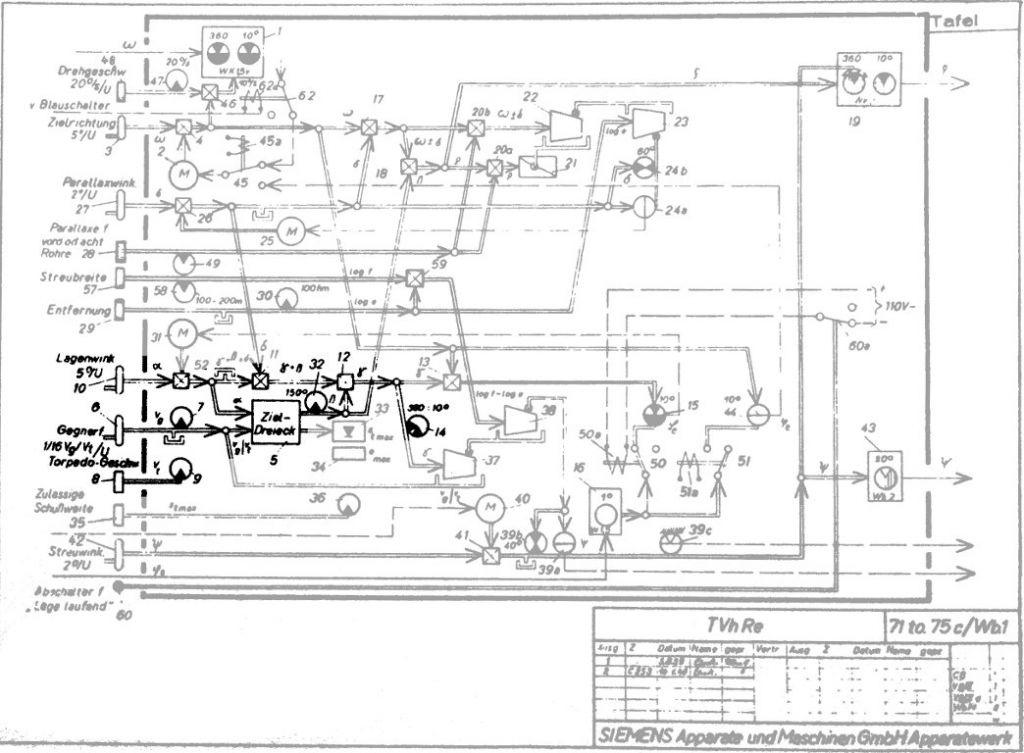
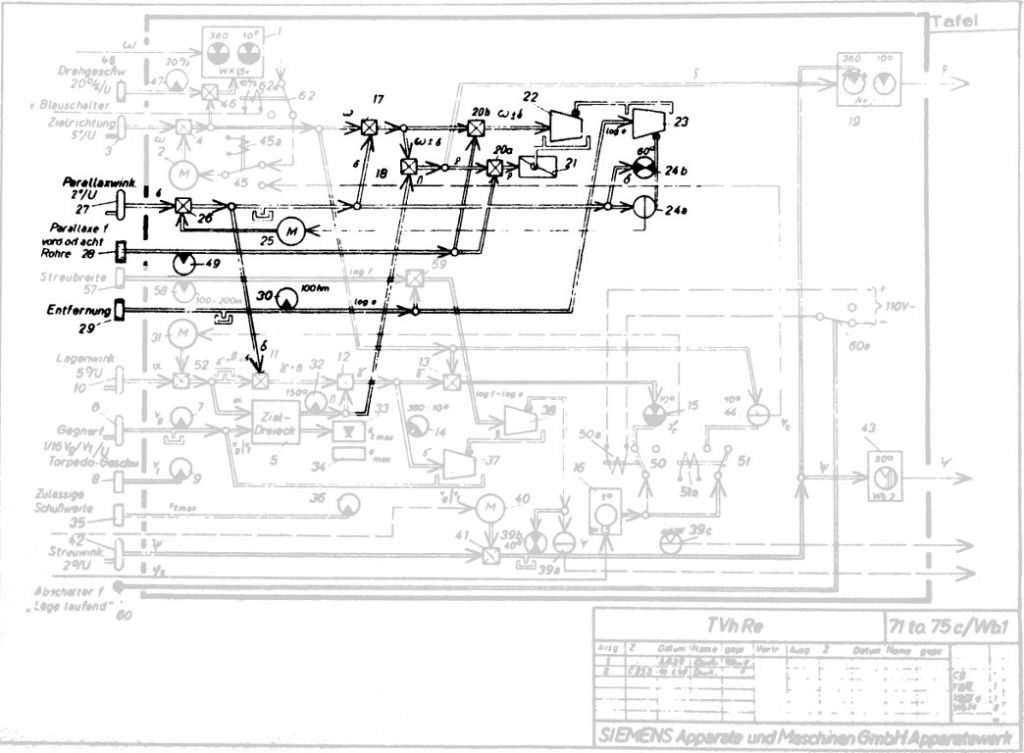
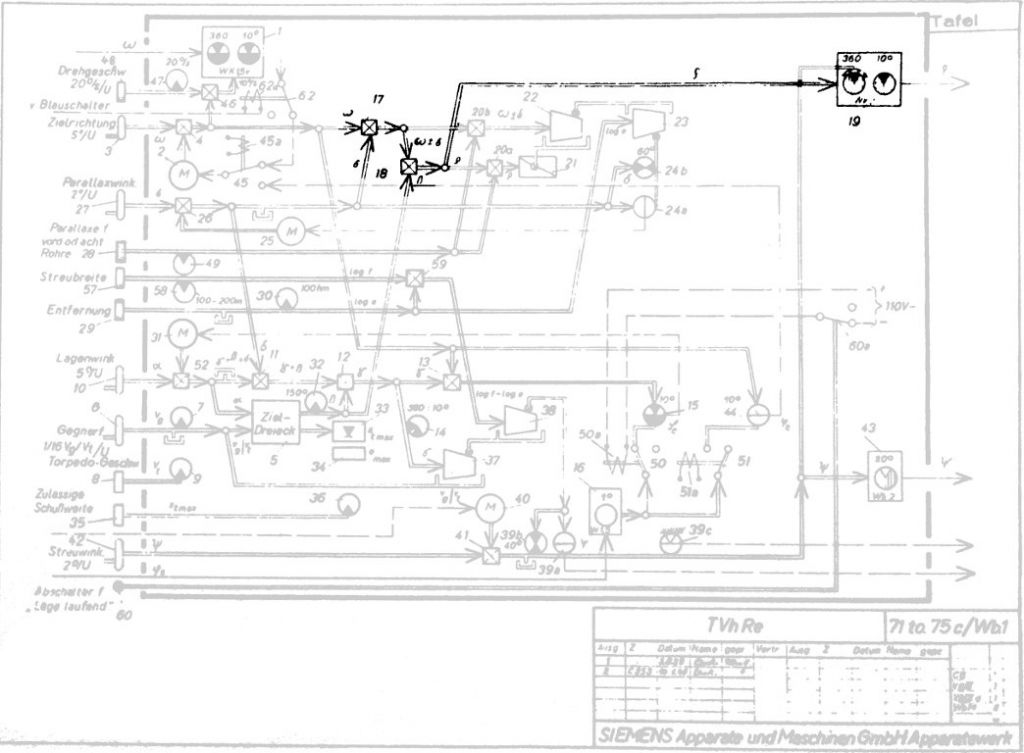
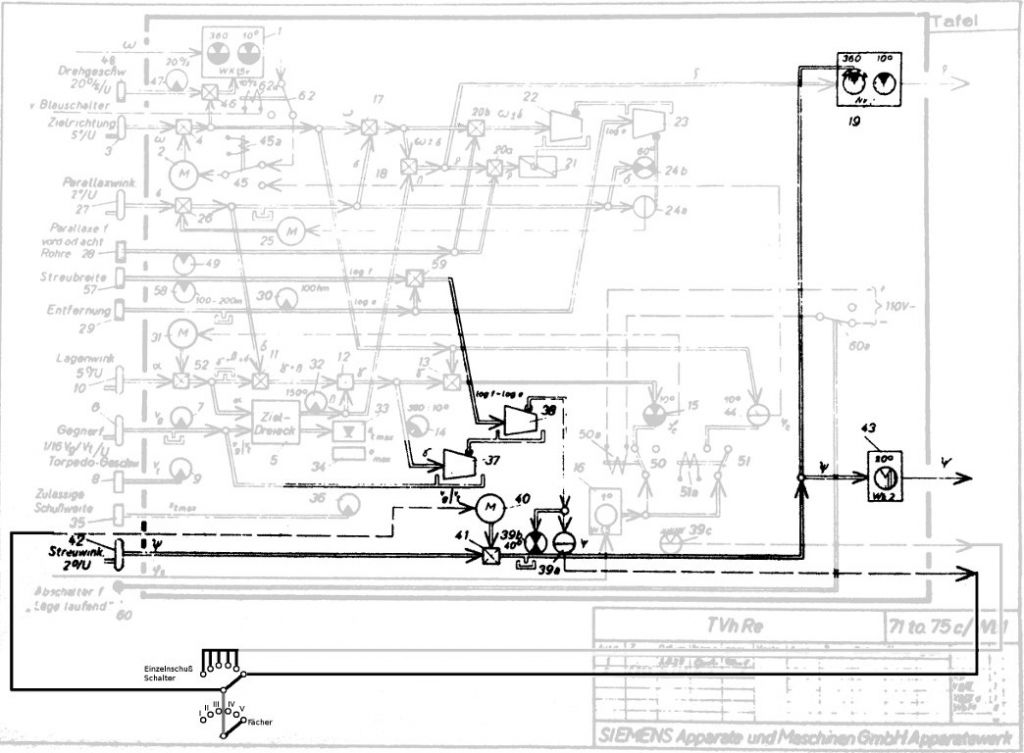
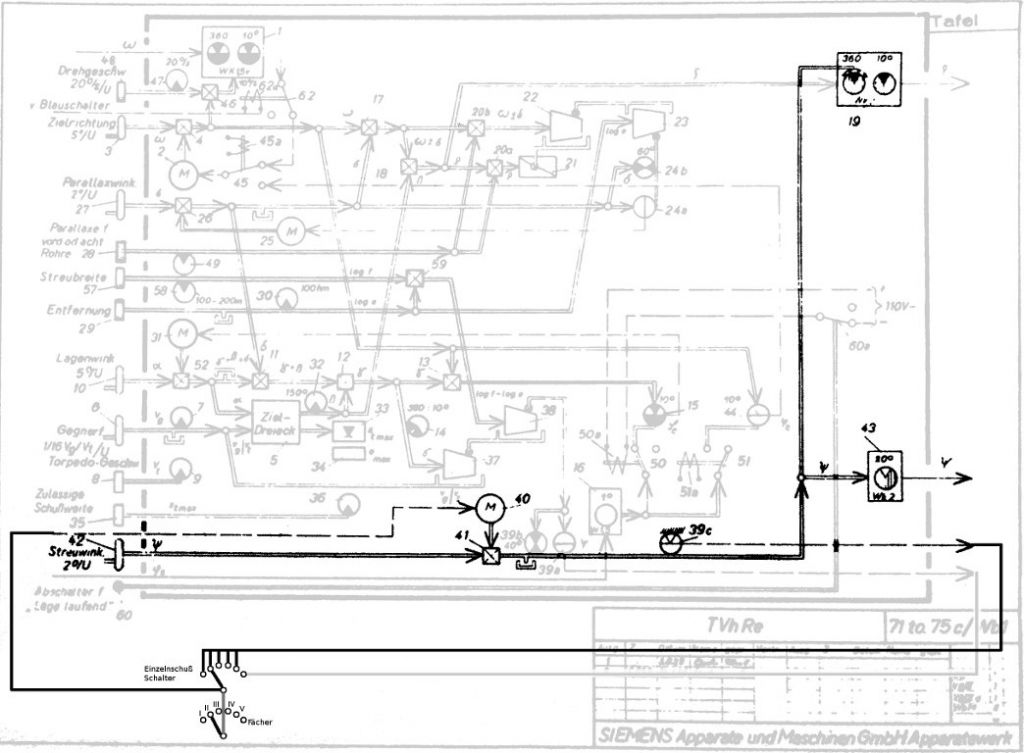
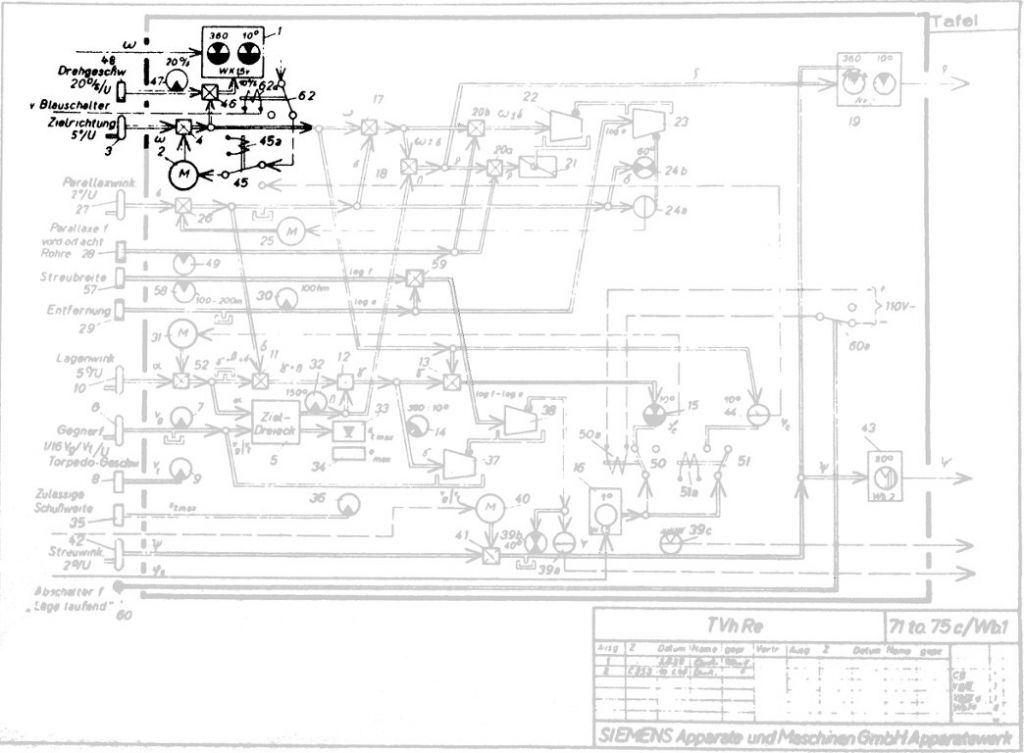
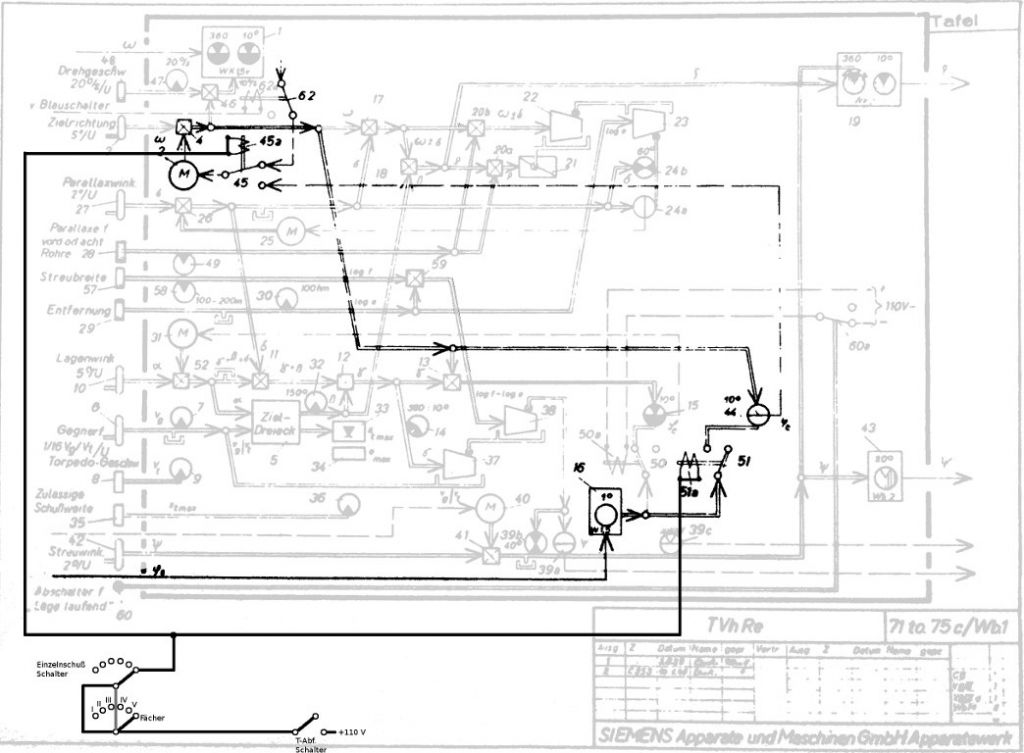
Desenho 1. O diagrama da calculadora de torpedos T. Vh. Ré. S3 – válido em 1940 [1]
Descrição do componente para resolver o triângulo de torpedo:
O componente para resolver o triângulo do torpedo calculou o ângulo de deflexão β a partir dos seguintes valores: ângulo de impacto do torpedo α e o quociente entre o alvo e a velocidade do torpedo \(\frac{v_{g}}{v_{t}} \). A saída adicional deste componente foi usada para calcular a distância máxima até o alvo e max no momento do lançamento do torpedo.. A saída adicional deste componente foi usada para calcular a distância máxima até o alvo e
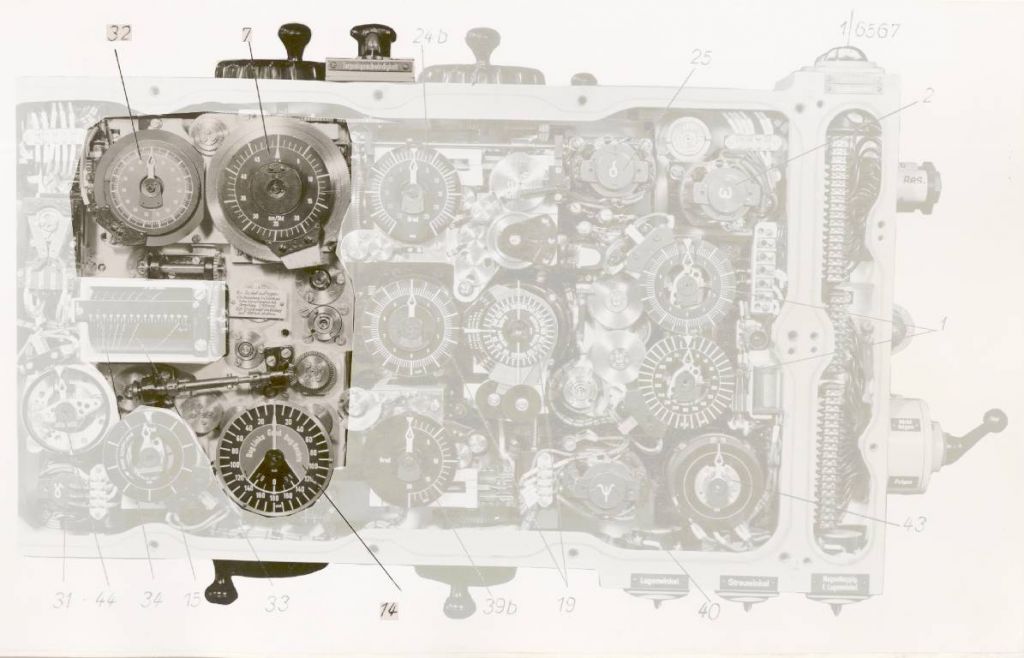
Foto 3. Componente para resolver o triângulo de torpedo – a vista após a remoção da tampa frontal
(7) seletor de velocidade alvo, (14) ângulo no seletor de proa, (32) seletor de ângulo de deflexão
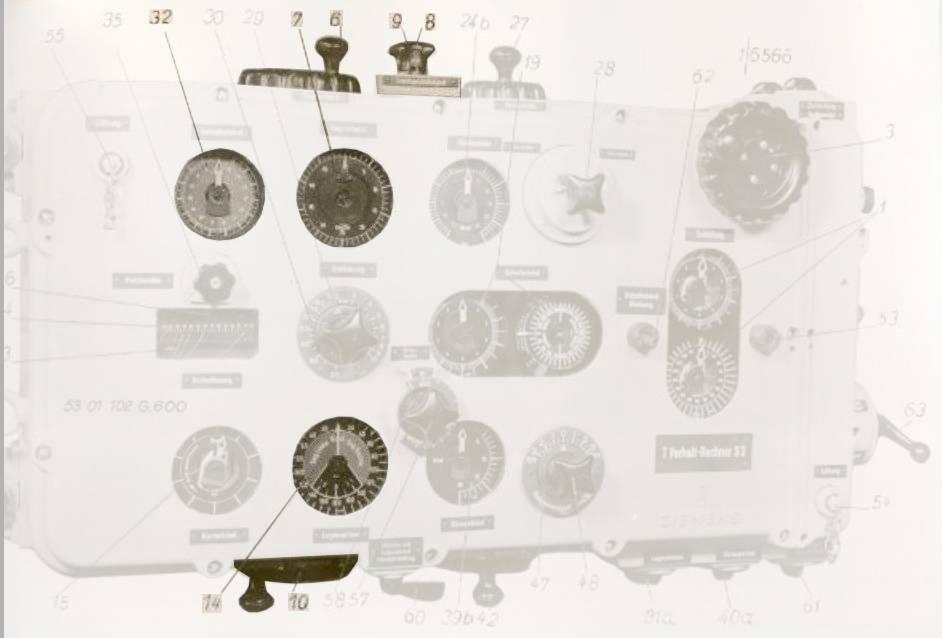
Foto 4. Componente para resolver o triângulo do torpedo – vista da tampa frontal
(6) botão de velocidade do alvo, (7) seletor de velocidade do alvo, (8) botão de velocidade do torpedo,
(9) indicador de velocidade do torpedo, (14) ângulo na proa mostrador, (32) mostrador de ângulo de deflexão
A velocidade do torpedo v t e o quociente do alvo e a velocidade do torpedo \(\frac{v_{g}}{v_{t}} \) foram inseridos por meio dos botões. foi inserido por meio dos botões.
Nas primeiras versões da calculadora, o botão de velocidade do torpedo podia ser ajustado apenas em três posições (30, 40 ou 44 nós – a velocidade dos torpedos a vapor G7a então em serviço podia ser ajustada para esses valores, enquanto os torpedos elétricos G7e poderia cruzar apenas na velocidade de 30 nós). O quociente \(\frac{v_{g}}{v_{t}} \) e a velocidade do torpedo v t foram dados como entradas da unidade multiplicadora ( tipo rack ), que calculou a velocidade alvo v g indicada pelo dial . Após definir a velocidade do torpedo desejada, o operador girava o botão responsável por definir o quociente entre o alvo e a velocidade do torpedo, para fazer com que o ponteiro da discagem rápida do alvo mostrasse o valor correto. e a velocidade do torpedo v
Assim, em vez de usar a unidade de divisão complexa para calcular o quociente, a unidade multiplicadora muito mais simples pode ser usada.
Na versão posterior da calculadora, o alvo e a velocidade do torpedo eram mostrados pelo mostrador composto. A velocidade do torpedo pode ser definida para qualquer valor na faixa de 10 a 46 nós. Isso ocorreu devido ao ajuste da construção da calculadora para uso com os torpedos LUT e acústicos G7e.

Foto 5. Botões e mostradores do alvo e velocidade do torpedo na versão inicial da calculadora

Foto 6. Botões e mostradores do alvo e velocidade do torpedo na versão posterior da calculadora
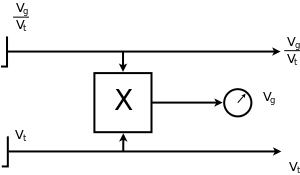
Desenho 2. O princípio de cálculo do quociente \(\frac{v_{g}}{v_{t}} \) na versão inicial da calculadora na versão inicial da calculadora
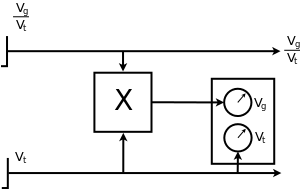
Desenho 3. O princípio de cálculo do quociente \(\frac{v_{g}}{v_{t}} \) na versão posterior da calculadora na versão posterior da calculadora
O ângulo na proa foi inserido indiretamente – o ângulo de impacto do torpedo α foi inserido por meio do botão e depois foi passado para o componente para resolver o triângulo do torpedo. O ângulo de impacto do torpedo α foi adicionado simultaneamente ao ângulo de deflexão β (calculado a partir do ângulo de impacto do torpedo atual α e o quociente entre o alvo e a velocidade do torpedo \(\frac{v_{g}}{v_{t}} \)) resultando finalmente no ângulo calculado no arco γ sendo mostrado no ângulo no mostrador do arco (o cálculo foi baseado no princípio de que a soma dos três ângulos no triângulo: α , β e γ é constante e igual a 180 °). ) resultando finalmente no ângulo calculado no arco γ sendo mostrado no ângulo no mostrador do arco (o cálculo foi baseado no princípio de que a soma dos três ângulos no triângulo: α , β e γ é constante e igual a 180°).
Desenho 4. Componente para resolver o triângulo do torpedo [1]
O componente para resolver o triângulo do torpedo calculou o ângulo de deflexão β – que é o ângulo entre a linha de direção alvo e o curso do torpedo. Este ângulo foi mostrado no mostrador (com a escala na faixa de 150°, mas o mostrador foi dividido em duas partes: 75° para bombordo e 75° para estibordo).
Deve-se notar que na calculadora de torpedos de U 995, este mostrador é equipado com uma escala na faixa de 360°, (dividida em duas partes: 180° para bombordo e estibordo). Isso ocorre porque em versões posteriores da calculadora, a apresentação do ângulo de deflexão (Germ. Vorhaltwinkel ) foi abandonada. O ângulo de impacto (Germ. Schneidungswinkel ) foi apresentado em seu lugar.
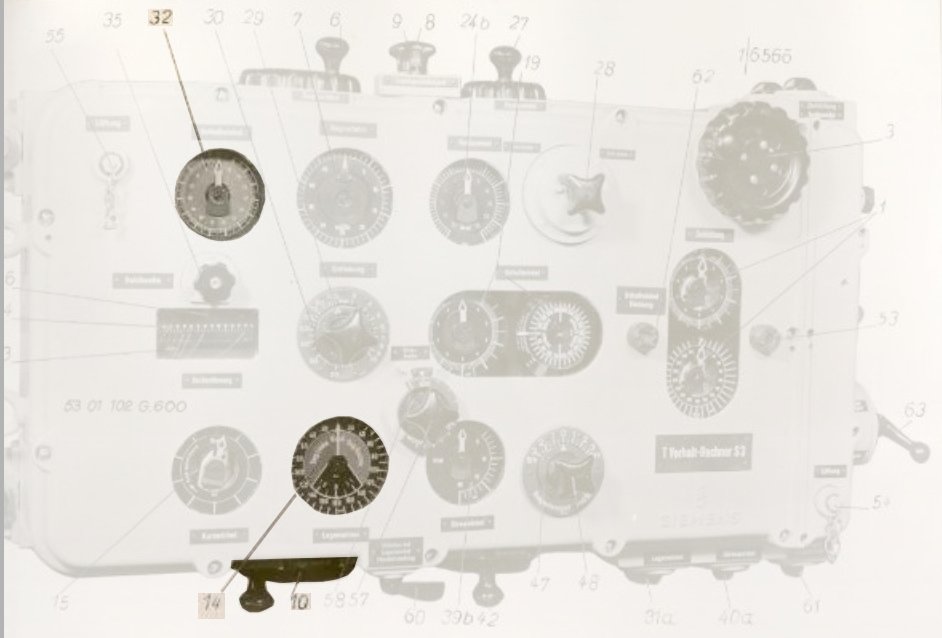
Foto 7. O botão (10) e mostrador (14) do ângulo no arco e mostrador (32) mostrando o ângulo de deflexão
O triângulo do torpedo se parece com o desenho abaixo:
Desenho 5. Triângulo de torpedo
A lei dos senos aplicada a este triângulo é a seguinte:
isso é
Como o componente recebe o quociente da velocidade do alvo e do torpedo, a seguinte substituição pode ser feita:
o que resulta em:
Como no triângulo a soma de todos os ângulos é sempre igual a 180°, pode-se notar:
Isto é (devido à característica periódica da função senos)
Assim obtemos:
que pode ser transformado no resultado final:
Isso significa que o ângulo de deflexão β é calculado após inserir o quociente do alvo e velocidade do torpedo e ângulo de impacto do torpedo:
O componente para resolver o triângulo do torpedo é (provavelmente) implementado como um conjunto de cames tridimensionais e engrenagens diferenciais :
- came bidimensional, implementando a função ctg α
- Cam tridimensional implementando a função u * sin α
- Cam bidimensional invertendo a função u * sin α
- engrenagem diferencial realizando a subtração
- Função de implementação de came bidimensional arc ctg
Desenho 6. Implementação presumida do componente para resolver o triângulo de torpedo
Descrição do componente para calcular a correção de paralaxe:
O componente para resolver o triângulo do torpedo modela matematicamente a situação ideal, quando o dispositivo de mira do torpedo está localizado no mesmo local que o tubo do torpedo, e o torpedo depois de sair do tubo percorre um curso reto.
No caso do U-Boat isso não é verdade – o dispositivo de mira está localizado a alguma distância dos tubos de torpedo (nos U-Boats tipo VII esta distância é de ~28 metros). Isso significa que a orientação do alvo tomada no tubo de torpedo é diferente da orientação tomada no dispositivo de mira. Da mesma forma, o ângulo na proa – observado do tubo do torpedo é diferente daquele observado no dispositivo de mira.
Desenho 7. A diferença nos rumos do alvo e ângulos na proa observados nos tubos de torpedo e no dispositivo de mira
Além disso, quando o torpedo gira depois de sair do tubo, ele percorre uma pista paralela à linha que liga o tubo de torpedo ao ângulo de impacto. Esta pista real é deslocada pelo valor que depende do ângulo de giro (ângulo do giroscópio ρ).
Desenho 8. O deslocamento da pista do torpedo resultante da curva do torpedo
Esses dois efeitos requerem levar em conta alguma correção ao resolver o triângulo do torpedo. Essa correção é chamada de correção de paralaxe δ (Germ. Winkelparalaxverbesserung ). O triângulo de torpedo com a correção de paralaxe é baseado no chamado ponto de fogo equivalente (Germ. ideeller Torpedoeintrittsort ).
Desenho 9. O triângulo do torpedo baseado no ponto de disparo equivalente
O ponto de disparo equivalente localizava-se no prolongamento da pista do torpedo, a uma distância igual à soma da corrida inicial do torpedo reto e o comprimento do arco, a partir do ponto A onde terminava a curva. Em outras palavras, o comprimento da seção E 1 A é igual ao comprimento da seção EA. O conceito de ponto de tiro equivalente resulta do facto de a distância entre este ponto e o ponto onde terminou a curva ser igual à distância entre o tubo do torpedo e o ponto onde terminou a curva. Isso significa que ambos os segmentos podem ser percorridos pelo torpedo ao mesmo tempo. A localização do ponto equivalente de fogo E 1 depende do ângulo do giroscópio ρ.
No caso geral, a correção de paralaxe δ depende de três variáveis: orientação do alvo ω, distância do alvo E no momento do lançamento do torpedo e o ângulo do giroscópio ρ:
δ = f(ρ, ω, E)
Para resolver o triângulo de torpedo com base no ponto de tiro equivalente, é usado o ângulo na proa γ 1 (como observado a partir do ponto de tiro equivalente), que é o ângulo na proa γ 1 (como observado a partir do dispositivo de mira) modificado com a correção de paralaxe δ:
γ = γ 1 + δ
Em outras palavras, o ângulo na proa γ 1 é o ângulo observado do ponto equivalente de tiro, e a diferença entre os ângulos observados do ponto equivalente de tiro e o dispositivo de mira é a correção de paralaxe.
A correção de paralaxe δ é inserida no componente para resolver o triângulo de torpedo indiretamente.
O ângulo no arco γ 1 (como observado no dispositivo de mira) é visível no mostrador e é estritamente dependente dos ângulos α e β (onde o ângulo β é por sua vez dependente junto com os outros do ângulo α). Como mencionado anteriormente, o ângulo na proa é calculado como a soma do ângulo de deflexão β (que depende do ângulo α) e do ângulo de impacto do torpedo α. A esta soma é introduzida a componente adicional de correcção de paralaxe δ – então a soma dos ângulos (que é o ângulo na proa γ 1conforme observado do dispositivo de mira) é alterado pelo valor δ. Para ajustar o valor do ângulo na proa para o valor real, o operador gira o botão do ângulo de impacto do torpedo em pequenas quantidades, alterando ligeiramente o ângulo de deflexão β. O ângulo de deflexão foi adicionado à correção de paralaxe δ e ângulo de impacto α, resultando no ângulo na proa γ 1 (como observado do dispositivo de mira) – mas calculado com a correção de paralaxe levada em consideração (essa correção foi levada em consideração por alterando o ângulo de impacto).

Desenho 10. O componente para resolver o triângulo de torpedo com correção de paralaxe levado em consideração [1]
É claro que a correção de paralaxe depende (como mencionado anteriormente) do (entre outros) ângulo do giroscópio ρ, que por sua vez depende do ângulo de deflexão β. Em conexão com o fato de que para calcular a correção da paralaxe do ângulo de deflexão é necessária, é óbvio que a solução deste problema requer a resolução de um sistema de duas equações (implícitas). Este complexo problema matemático resultou no disparo de torpedos giro-angulares tornando-se comum após o desenvolvimento dos dispositivos de cálculo adequados (pelas marinhas alemã, japonesa e americana). Por outro lado, nas marinhas que não adquiriram tais dispositivos (entre outras as marinhas britânica, polonesa e russa) – apesar de terem a possibilidade técnica de lançar torpedos de giro-ângulo – foram utilizados os retos (sem giro-ângulo).
O cálculo da correção de paralaxe δ foi feito com base na localização do ponto equivalente de incêndio. As coordenadas cartesianas deste ponto (relativas ao dispositivo de mira) dependem do ângulo do giroscópio ρ e podem ser facilmente determinadas analiticamente. Há apenas a necessidade de conhecer o comprimento da reta inicial do torpedo, o raio de giro do torpedo (para os torpedos alemães G7a e G7e esses valores foram de 9,5 m e 95 m respectivamente) e a distância entre o tubo do torpedo e o dispositivo de mira (no no caso dos U-Boats do tipo VIIC este foi de ~27 m). Essas coordenadas podem ser expressas pelas seguintes fórmulas (para ângulo do giroscópio na faixa de 0-90°):
x 0 = 27 + 9,5 + 95 * sen ρ – (ρ * 95 + 9,5) * cos ρ
y 0 = 95 * (1 - cos ρ) – (ρ * 95 + 9,5) * sin ρ
(o ângulo ρ não sendo o argumento da função trigonométrica deve ser dado em radianos)
Desenho 11. A localização do ponto de disparo equivalente para o ângulo do giroscópio ρ na faixa de 0-90°
Para o valor dado do ângulo do giroscópio ρ, a localização do ponto de tiro equivalente em relação ao dispositivo de mira pode ser expressa por coordenadas polares: X(ρ) – distância entre o dispositivo de mira e o ponto de tiro equivalente, θ( ρ) – ângulo entre a linha diametral dos U-Boats e a linha que liga o dispositivo de mira e o ponto de tiro equivalente.
Desenho 12. As coordenadas polares do ponto de fogo equivalente
As coordenadas polares X(ρ) e θ(ρ) podem ser expressas pelas coordenadas cartesianas:
isso é:
Aplicando a lei dos senos ao triângulo apresentado no desenho abaixo, obtemos:
onde E significa a distância até o alvo no momento do lançamento do torpedo (medido a partir do dispositivo de mira).
Desenho 13. A relação entre a correção de paralaxe e a localização do ponto equivalente de fogo
A fórmula acima pode ser convertida para o seguinte:
Como na prática o valor da correção de paralaxe δ atinge um máximo de 25°, a seguinte aproximação pode ser feita:
(para os ângulos na faixa de 0 a 25°, o seno desse ângulo é aproximadamente igual a esse ângulo expresso em radianos).
Então finalmente obtemos:
A solução desta equação implícita é determinada pelo componente para calcular a correção de paralaxe.
Pelo diagrama acima, parece que o componente para calcular a correção de paralaxe consiste em um came bidimensional, dois cames tridimensionais e um comparador (que controla o motor elétrico), que é integrado ao mostrador composto.
A implementação exata deste componente não é conhecida, mas parece que o came bidimensional (cujo valor de entrada é o ângulo do giroscópio) é um came duplo que gera um par de valores de saída – as coordenadas polares do ponto de disparo equivalente (sua função pode ser interpretada como uma tabela de valores pré-calculados).
O primeiro came tridimensional indicado no diagrama é – muito provavelmente – um conjunto de dois cames tridimensionais, um deles recebe valores (ω + δ) e θ(ρ) e gera o valor sin (ω + δ + θ (ρ)), enquanto o outro – recebendo o valor de saída do primeiro came e valor X(ρ) implementa a função:
O segundo came tridimensional indicado no diagrama recebe como entrada o valor gerado pelo primeiro came tridimensional (ou mais provavelmente por um conjunto de dois cames, conforme descrito anteriormente) e o logaritmo da distância até o alvo. Esta câmera implementa a função:
isso é:
O valor de saída h(ρ, ω + δ, E) é comparado pelo comparador com o valor δ (o mesmo que é recebido pelo primeiro came tridimensional) e a seguinte equação é implementada:
que foi a base da nossa consideração do princípio de funcionamento do componente para calcular a correção de paralaxe.
O sinal de erro gerado pelo comparador controla o motor elétrico que gira o eixo responsável por definir o valor da correção de paralaxe δ. Todo o componente no loop de feedback tenta equalizar o lado esquerdo e direito da equação – ou seja, tenta resolvê-lo.
O valor atual do lado esquerdo e direito da equação é mostrado no mostrador composto (um ponteiro girando em torno da borda do mostrador e o segundo mostrador girando em torno do eixo central).
Em caso de danos nos subsistemas elétricos da calculadora, a operação manual é possível por meio do manípulo acoplado (através do diferencial) ao eixo responsável pelo ajuste da correção de paralaxe δ. Nesse caso, o operador observa os ponteiros no mostrador e, girando o botão, tenta combinar suas posições.

Foto 8. O botão (27) e dial (24b) da correção de paralaxe e interruptor de paralaxe (28)
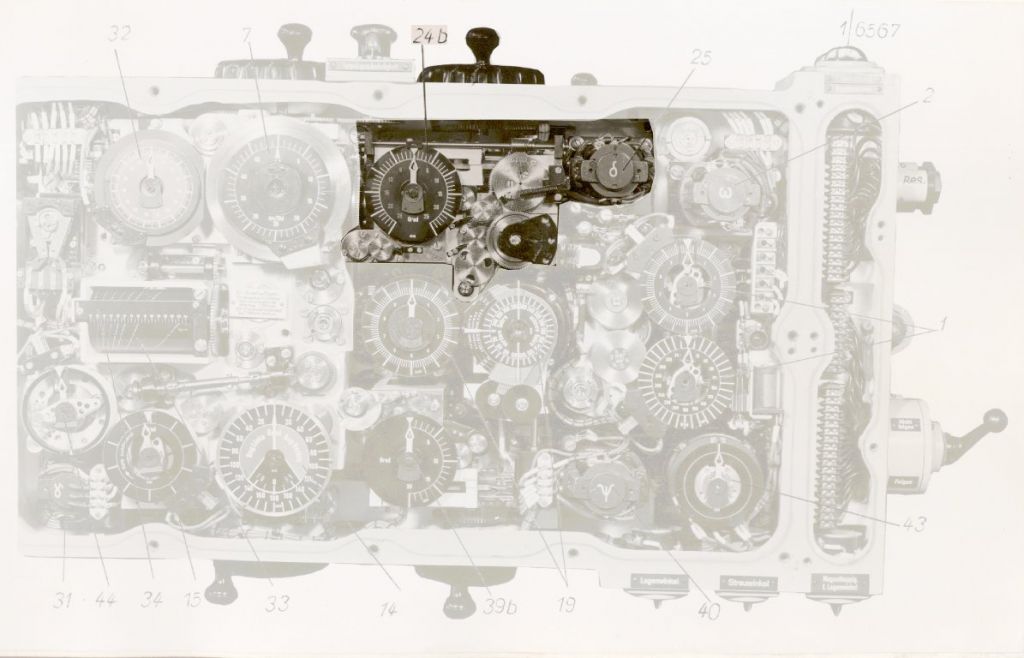
Foto 9. O componente para calcular a correção de paralaxe
(24b) dial de correção de paralaxe, (25) motor do componente para calcular a correção de paralaxe
Deve-se notar que um dos valores de entrada para o segundo came tridimensional é o logaritmo da distância E até o alvo. Este logaritmo é o efeito colateral da simplificação da calculadora em algum outro lugar – o componente para calcular o ângulo de dispersão da salva de torpedos. Nesse componente – ao invés de dividir dois valores – foi utilizada a diferença de dois logaritmos. É por isso que o logaritmo da distância até o alvo é passado para o componente para calcular a correção de paralaxe. Novamente - não está claro como é implementado - provavelmente a função implementada pelo segundo came tridimensional é composta também da função exponencial (que é a função inversa do logaritmo) para obter a distância simples.
Para quaisquer ângulos giroscópicos inseridos no torpedo carregado no tubo de popa, a coordenada cartesiana x 0 do ponto de disparo equivalente é negativa. Isso significa que a coordenada polar θ(ρ) tem o sinal oposto em relação ao valor para o mesmo ângulo do giroscópio definido nos tubos de proa. Para manter os cálculos corretos, o sinal da correção de paralaxe calculada δ deve ser invertido. Foi feito por meio de um par adicional de engrenagens com a relação 1:-1, que foram acopladas ao circuito por meio da chave de paralaxe ( Parallax Vorn/Acht ). Este interruptor tinha que ser ajustado na posição correta dependendo dos tubos de torpedo usados (proa ou popa).
Descrição do componente para calcular o ângulo do giroscópio:
O ângulo de deflexão β calculado pelo componente para resolver o triângulo do torpedo é o ângulo entre a linha de direção do alvo (no momento do lançamento do torpedo) e a pista do torpedo. Para lançar o torpedo de acordo com o ângulo de deflexão calculado, o tubo de torpedo tinha que ser direcionado (treinando o tubo no caso de tubos treináveis ou manobrando a embarcação no caso de tubos fixos) de modo que o ângulo entre a linha longitudinal de o tubo e a linha de orientação do alvo no momento do disparo era igual ao ângulo de deflexão β. Após torpedos que conseguiram virar (depois de sair do tubo) pelo ângulo previamente definido (ângulo do giroscópio) entraram em serviço, mirar com o tubo ou manobrar a embarcação tornou-se desnecessário.

Desenho 15. O triângulo de torpedo para um tiro de torpedo reto e para um lançamento de torpedo com um ângulo de giroscópio
A engrenagem giroscópica do torpedo teve que ser ajustada para o ângulo giroscópico ρ, que é igual à soma do ângulo de deflexão β e o alvo tendo ω 1 como observado do ponto equivalente de tiro.
ρ = ω 1 - β
Como pode ser visto no desenho abaixo, a orientação do alvo observada do ponto equivalente de tiro é igual à orientação do alvo observada do dispositivo de mira, mas modificada pelo valor da correção de paralaxe δ.

Desenho 16. A relação entre os rolamentos do alvo observados do ponto equivalente de tiro e do dispositivo de mira
Assim, o ângulo do giroscópio pode ser expresso da seguinte forma:
ρ = ω + δ - β
O ângulo do giroscópio é calculado pelo componente para cálculo do ângulo do giroscópio, que consiste em duas engrenagens diferenciais e um mostrador duplo acoplado a um transmissor selsyn.
Desenho 17. O componente para calcular o ângulo do giroscópio [1]
O mostrador do ângulo do giroscópio apresenta (usando dois mostradores) o ângulo do giroscópio calculado. Um mostrador mostrava o ângulo na faixa de 0 a 360°, o segundo, na faixa de 0 a 10°. O ângulo do giroscópio foi mostrado como o ângulo medido em relação à linha longitudinal do U-Boat. Os transmissores selsyn acoplados aos mostradores transmitiam o valor do ângulo do giroscópio para os receptores do ângulo do giroscópio, que estavam localizados nos tubos de torpedo.
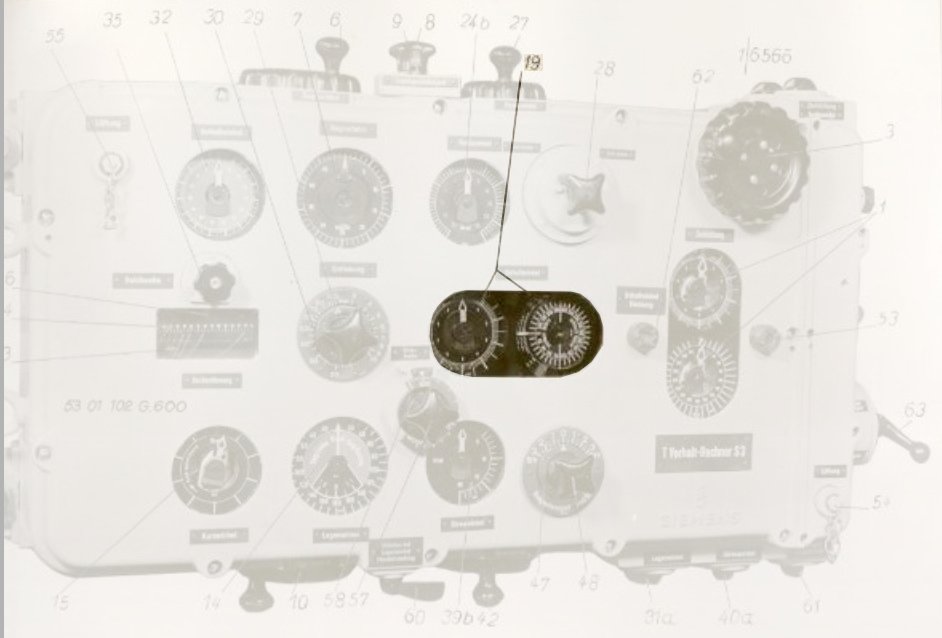
Foto 10. Mostrador de ângulo giroscópio duplo
Descrição do componente para cálculo da distância máxima ao alvo no momento do lançamento do torpedo:
O componente para resolver o triângulo do torpedo também possibilitou o cálculo da distância máxima permitida ao alvo e max (Germ. Reichentfernung ) no momento do lançamento do torpedo para um determinado comprimento do torpedo run s t max (Germ. Reichweite ).
Desenho 18. Triângulo de torpedo com base na distância máxima permitida para o alvo e max e comprimento do torpedo run s t max
Assim, conhecendo o comprimento máximo da corrida de torpedos, o oficial torpedo poderia saber se a distância até o alvo no momento do lançamento do torpedo está dentro do alcance dos torpedos.
Foto 11. O componente para calcular a distância máxima até o alvo
(33) tambor mostrando o comprimento máximo da corrida do torpedo,
(34) o linear com uma escala para ler a distância máxima permitida até o alvo no momento do lançamento do torpedo
Foto 12. Indicadores e botões do componente para calcular a distância máxima ao alvo
(33) tambor mostrando o comprimento máximo do percurso do torpedo
(34) o linear com a escala para leitura da distância máxima permitida ao alvo no momento do disparo lançamento de torpedo
(35) o comprimento máximo do botão de execução de torpedo, (36) o comprimento máximo do indicador de execução de torpedo
O indicador que mostra a distância máxima até o alvo é na forma de um tambor treinável (s t max ) com um eixo horizontal de rotação e uma régua horizontal (e max ) com uma escala na faixa de 10 a 140 hm. Linhas marcadas com valores de 10 a 140 hm são desenhadas na superfície lateral do tambor.
Além disso, o botão acoplado ao mostrador está localizado sobre o tambor. Este botão é usado para inserir o comprimento máximo do percurso do torpedo (Germ. Zulassige Schußweite , que para os torpedos a vapor era igual a - dependendo da velocidade - 12.500, 8.000 e 6.000 metros, enquanto para os torpedos elétricos - dependendo da versão - 5000 e 7500 metros).
Foto 13. O botão para definir o comprimento máximo do torpedo
O componente para resolver o triângulo de torpedo, além de calcular o ângulo de deflexão β, também calcula a distância até o alvo para o comprimento máximo unitário de corrida de torpedo (ou seja, para um comprimento máximo de corrida de torpedo de 1).
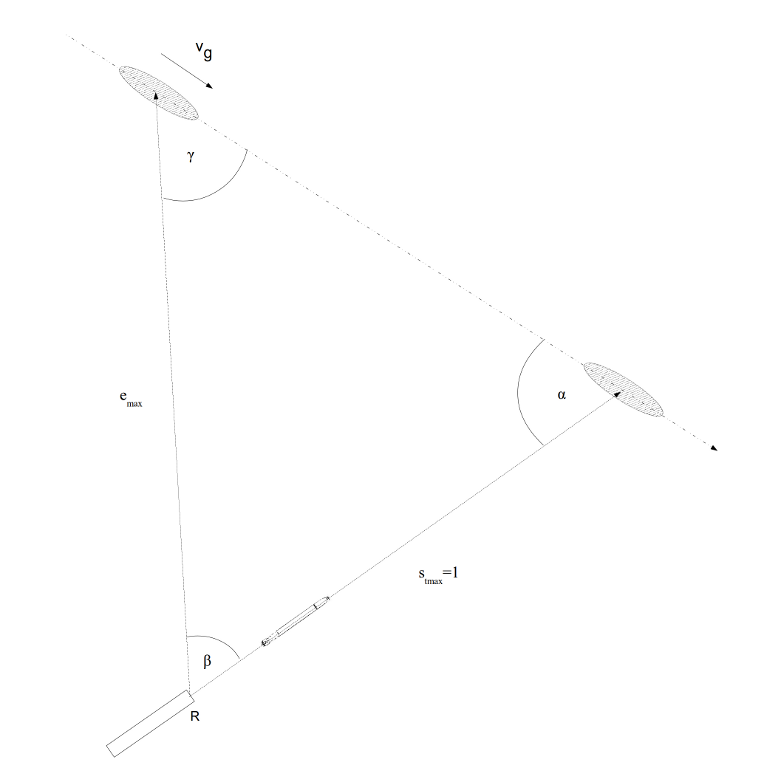
Desenho 19. O triângulo de torpedo com base no comprimento máximo unitário de execução do torpedo s t max = 1
Devido à falta de informações sobre a construção interna do componente para resolver o triângulo do torpedo, é difícil determinar com certeza como esse cálculo foi realizado. Muito provavelmente foi usada a seguinte fórmula (que usou a lei dos senos)
isto é (para s t unitário )
Esta função pode ser implementada como um came tridimensional e uma engrenagem diferencial. A distância ao alvo e (para comprimento máximo unitário do percurso do torpedo) é conduzida para fora do componente por meio do eixo que acionou o tambor.
Várias linhas são desenhadas na superfície lateral do tambor. Depois de desenrolar a superfície lateral ao plano, obtemos o seguinte desenho:
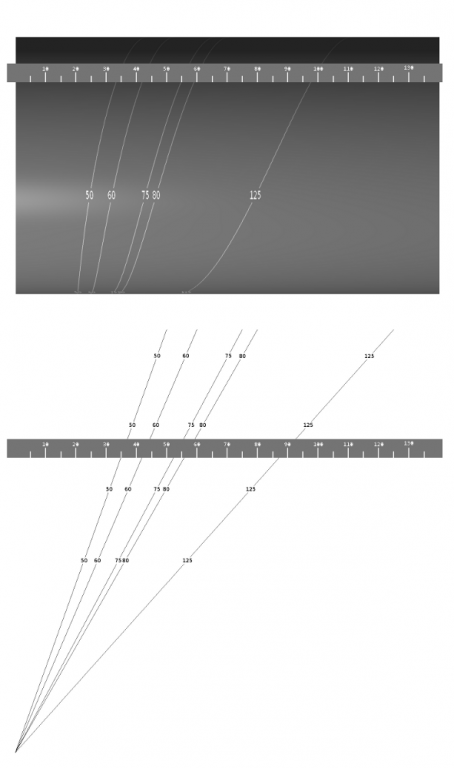
Desenho 20. O tambor e a superfície lateral desenrolada do tambor
Depois de desenrolar a superfície lateral – para facilitar a exanimação – giramos o desenho em 90°. Vamos supor que o tambor não está girando, mas a régua se move (ou seja, a superfície lateral desenrolada não se move sob a régua), mas a régua se move sobre a superfície desenrolada para a direita e para a esquerda.
Desenho 21. A superfície lateral desenrolada do tambor após girá-lo em 90°
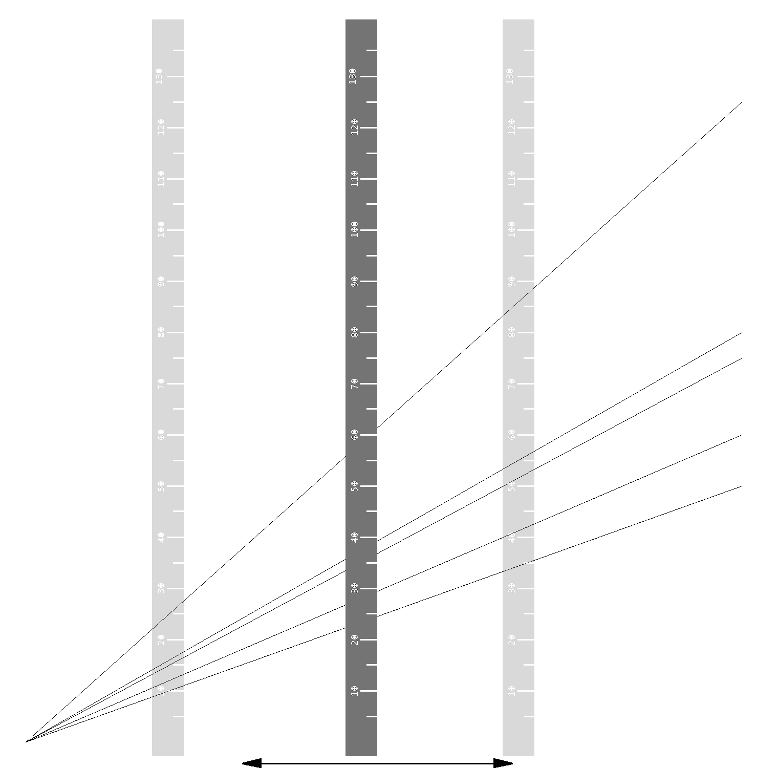
Como a rotação do tambor – ou movimento da régua vertical – corresponde à distância até o alvo para comprimento unitário da corrida de torpedo s t max = 1, se multiplicarmos essa distância por qualquer valor do comprimento máximo da corrida de torpedo (digamos 5.000 metros), obtemos a distância até o alvo não pelo comprimento unitário da corrida de torpedo, mas pelo comprimento máximo da corrida de torpedo igual a (ou seja) 5.000 metros. Pode ser formalmente expresso como:
e max = e * s t max
onde s t max é (ie) 5000 metros.
Linhas são desenhadas na superfície lateral do tambor que são funções lineares expressas pela fórmula acima, mas para valores diferentes s t max . Essas linhas estão todas passando pela origem do sistema de coordenadas e diferem apenas por uma inclinação. A relação entre o ângulo de inclinação α e a constante s t max é a seguinte:
No desenho abaixo, uma linha na lateral foi destacada (arbitrariamente). Esta linha corresponde à constante s t max = 7500 metros. O valor e max é encontrado encontrando na régua vertical móvel o ponto onde a régua cruza a linha correspondente ao comprimento máximo da corrida do torpedo (neste caso: 7500 metros). O valor lido na escala na régua associada a este ponto cruzado é igual ao valor da função:
e max = e * s t max
para a distância ao alvo e (calculada para o comprimento máximo unitário do percurso do torpedo) calculado pela componente para resolver o triângulo do torpedo e a constante s t max que correspondia ao comprimento máximo do percurso do torpedo real.
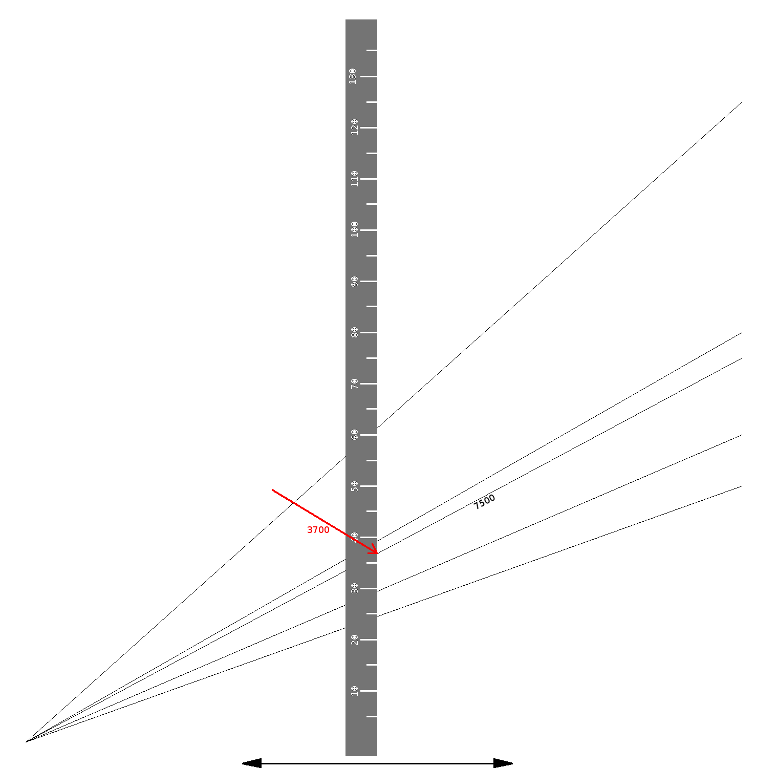
Desenho 22. A maneira de ler a distância máxima até o alvo (neste caso ~3650 metros) no momento do lançamento do torpedo para um torpedo com o comprimento máximo de corrida igual a 7500 metros
O comprimento máximo do torpedo é definido pelo botão no início da operação da calculadora. Este valor definido inicialmente dispensa o operador de lembrar-se deste valor e possibilita a verificação sempre que necessário. Quando a calculadora é usada durante o ataque com a salva de torpedos com torpedos de vários tipos (ou seja, dois torpedos a vapor e dois torpedos elétricos), o valor inserido do comprimento máximo da corrida de torpedos é igual ao valor mais baixo.
Desenho 23. O componente para calcular a distância ao alvo no momento do lançamento do torpedo [1]
Descrição do componente para cálculo do ângulo de dispersão da salva de torpedos:
Ao lançar uma salva de torpedos, cada torpedo percorre um curso ligeiramente diferente. Assim, a probabilidade de atingir o alvo é aumentada, pois vários torpedos cruzam o curso do alvo em vários pontos diferentes (compensando assim os erros na estimativa dos parâmetros do curso do alvo), não apenas em um ponto como no caso de um único tiro.
Desenho 24. Salvo de torpedos
O ângulo do giroscópio ρ para cada torpedo na salva é calculado da mesma forma que no caso de um único tiro, mas adicionalmente, a calculadora avalia o ângulo de dispersão da salva ψ e esse valor é usado para modificar os ângulos do giroscópio. Estes dois valores: ângulo do giroscópio ρ e ângulo de dispersão ψ são transmitidos por meio de ligações selsyn para o receptor do ângulo do giroscópio (Germ. Schußwinkelempfänger ). No receptor de ângulo giroscópico, dependendo do tamanho da salva, foi calculado o ângulo giroscópio individual para cada um. Uma descrição da operação do receptor de ângulo giroscópico está disponível aqui .
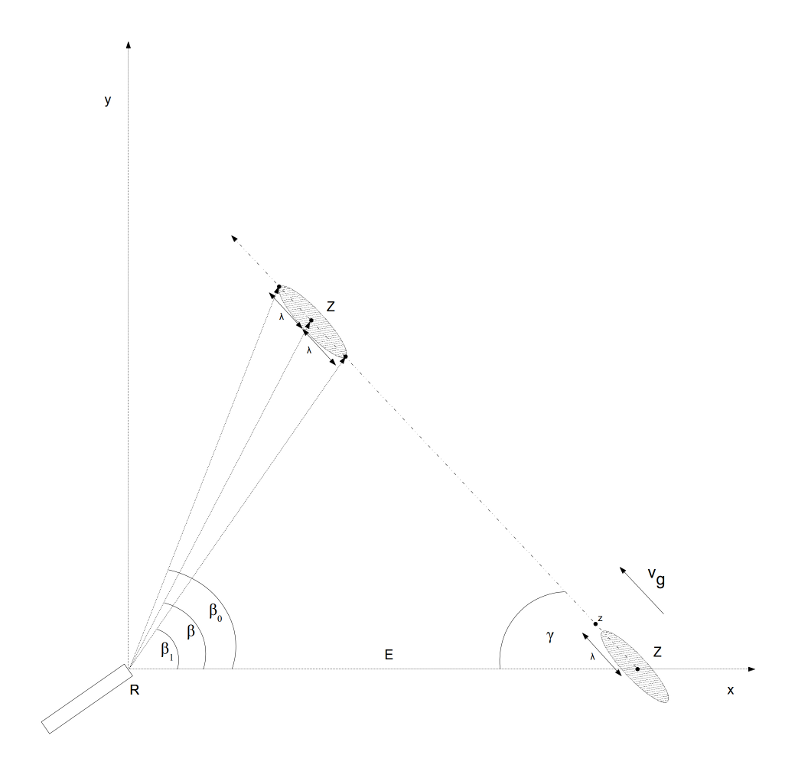
O ângulo de espalhamento da salva de torpedos ψ depende da distância até o alvo E, comprimento do alvo l, ângulo na proa γ e quociente do alvo e velocidade do torpedo \(\frac{v_{g}}{v_{t}} \). .
O ângulo de dispersão é calculado da seguinte maneira. O desenho abaixo apresenta a trajetória do torpedo, rumo do alvo e linha de direção do alvo no momento do lançamento do torpedo. O desenho é orientado de tal forma que a linha de orientação alvo se sobrepõe ao eixo horizontal do sistema de coordenadas.
Desenho 25. Triângulo de torpedo
As coordenadas que descrevem a localização do torpedo T e do alvo Z, dependendo do tempo, podem ser expressas pelas seguintes fórmulas:
T: \( \begin{cases} x = t * v_{t} * cos β \\ y = t * v_{t} * sin β \end{cases} \) Z: \( \begin{cases} x = E – t * v_{g} * cos γ \\ y = t * v_{g} * sin γ \end{casos} \) Z:
onde t – tempo, v t – velocidade do torpedo, v g – velocidade do alvo, β – ângulo de deflexão, γ – ângulo na proa, E – distância ao alvo no momento do lançamento do torpedo.
As coordenadas do ponto z, que está localizado em relação ao ponto Z pela distância λ (mas está localizado no curso alvo) podem ser expressas da seguinte forma:
z: \( \begin{cases}x = E – (t * v_{g} + λ) * cos γ \\ y = (t * v_{g} + λ) * sin γ\end{cases} \)
Desenho 26. Triângulo torpedo com o ponto z
As coordenadas da proa e da popa do alvo podem, portanto, ser definidas pelo par de valores λ = λ 0 e λ = -λ 1 .
O quadrado da distância entre o ponto T, onde se encontra o torpedo e o ponto z, pode ser expresso pela fórmula:
O torpedo passa o ponto z (que é atingido na proa ou popa do alvo), somente quando a distância |Tz| é igual a 0, ou seja:
Essa condição é verdadeira somente quando todas as fórmulas a seguir são verdadeiras:
i
isso é
e
As equações acima podem ser transformadas para o valor designado de tempo t:
e
e então eles podem ser comparados:
Se a seguinte substituição for realizada:
oraz
Nós temos:
Esta é uma equação implícita que permite calcular o ângulo de deflexão β para o ângulo na proa γ, de tal forma que o torpedo atinja o ponto z, que está localizado à distância λ do meio do alvo.

Desenho 27. Triângulo de torpedo com o torpedo atingindo o ponto z
Deve-se notar que quando o valor λ é 0 (isto é, quando queremos que o torpedo atinja o meio do alvo), a equação fica assim:
Sabendo que:
podemos ver, que esta é a lei dos senos aplicada ao triângulo torpedo.
Por conveniência, em vez de considerar a localização da popa e proa do alvo como os pontos distanciados do meio do alvo pelo valor λ, pode-se fazer a seguinte substituição:
onde l é o comprimento do alvo.
Para fazer uma salva de três torpedos atingindo a proa, meio e popa do alvo, cada torpedo deve ser lançado com o ângulo de deflexão β 0 , β e β 1 respectivamente, onde cada um desses valores atende a uma das seguintes equações:
Desenho 28. Triângulo de torpedo para uma salva
Porque, na prática, na maioria dos casos o alvo (com comprimento até 150 metros – ou seja, navios de carga tipo Liberty: ~135 metros, petroleiros tipo T2: ~152 metros) foram atacados a uma distância mínima de 500 metros, o valor μ 0 é bastante pequeno (μ 0 < 0,15). Isso significa que o ângulo entre os cursos de torpedos apontados para a proa e a popa do alvo (que é o ângulo β 1 - β 0 ) é no máximo ~ 20°. Sabendo que para os ângulos α na faixa de 0 – 20°, o sen α ~ α e cos α ~ 1, todas as três equações acima podem ser transformadas na forma:
Depois de inserir a segunda equação nas outras duas, recebemos duas fórmulas:
Assim, o ângulo de dispersão da salva ψ (sendo a diferença β 1 – β 0 ) pode ser calculado usando a seguinte fórmula:
Essa fórmula pode ser transformada na seguinte:
onde o ângulo de propagação depende do ângulo na proa γ, comprimento do alvo l, distância ao alvo E no momento do lançamento e quociente do torpedo e velocidade do alvo \(\frac{v_{t}}{v_{ g}}\). .
Esta fórmula é muito mais complicada, mas sua vantagem é que não há necessidade de usar os valores que são calculados por outros componentes da calculadora (ângulo de deflexão β). Muito provavelmente, os projetistas da calculadora queriam tornar possível o cálculo do ângulo de dispersão, mesmo que o componente para resolver o triângulo do torpedo estivesse danificado.
Esta fórmula foi implementada usando dois cames tridimensionais e engrenagens diferenciais.
O primeiro came tridimensional recebe como entradas o quociente do alvo e a velocidade do torpedo \(\frac{v_{g}}{v_{t}}\) e o ângulo na proa γ. e o ângulo do arco γ.
Conforme mencionado anteriormente (na descrição do componente para calcular a correção de paralaxe), a distância até o alvo é inserida na calculadora como um valor logarítmico. O comprimento alvo foi inserido de maneira semelhante. Assim, o cálculo do quociente \(\frac{l}{E}\) foi realizado pela engrenagem diferencial subtraindo esses valores. O valor logarítmico deste quociente é alimentado (junto com o valor de saída do primeiro came tridimensional) às entradas do segundo came tridimensional. Seu valor de saída é o ângulo de dispersão da salva ψ. foi realizado pela engrenagem diferencial subtraindo esses valores. O valor logarítmico deste quociente é alimentado (junto com o valor de saída do primeiro came tridimensional) às entradas do segundo came tridimensional. Seu valor de saída é o ângulo de dispersão da salva ψ.
O ângulo de dispersão da salva é mostrado no mostrador que é dimensionado na faixa de 0 a 20°. Este mostrador é do tipo composto – seu ponteiro interno mostra o valor de saída do came, enquanto o ponteiro externo (na borda do mostrador) mostra o valor representado pelo eixo sendo girado pelo motor elétrico. O motor elétrico é controlado pelo sinal de erro, que resulta da posição relativa de ambos os ponteiros – ou seja, o motor elétrico gira o eixo de forma a coincidir com as posições de ambos os ponteiros. Este eixo também aciona o transmissor selsyn, que transmite o valor do ângulo de dispersão para o receptor de ângulo giroscópico.
Em caso de danos no subsistema elétrico ou no motor elétrico, o componente pode ser operado manualmente (através do diferencial) por meio do botão.
Além disso, após desconectar o motor elétrico, é possível inserir um valor arbitrário da salva espalhada por meio do botão.
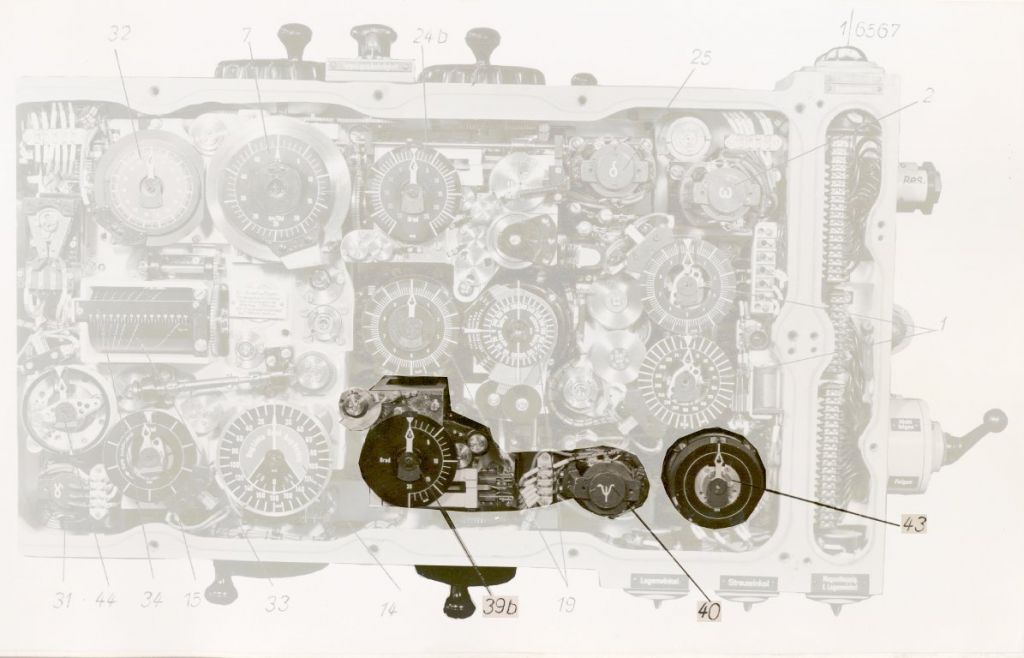
Foto 14. Componente para cálculo do ângulo de espalhamento do torpedo salvo
(39b) mostrador do ângulo de espalhamento do salva torpedo
(40) motor do componente para cálculo do ângulo de espalhamento do salva torpedo
(43) transmissor selsyn para o ângulo de espalhamento do salva torpedo
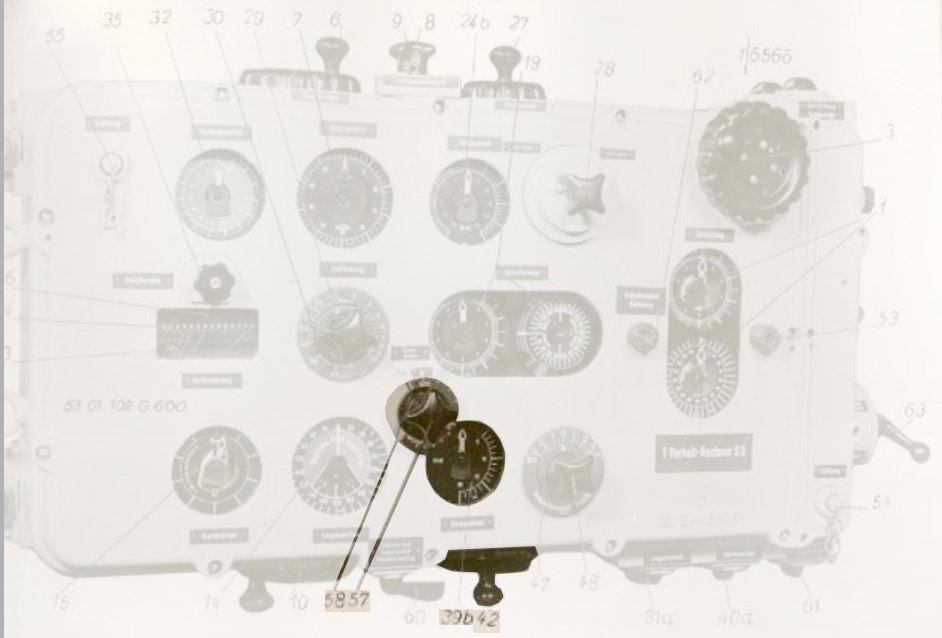
Foto 15. Os mostradores e botões do componente para calcular o ângulo de dispersão do torpedo
(39b) mostrador do ângulo de dispersão do torpedo salvo
(42) botão do ângulo de dispersão do torpedo salvo
(57) botão do comprimento do alvo
(58) indicador do comprimento do alvo
O chamado “indicador de ajuste zero” também é acoplado ao eixo do motor elétrico.
Dependendo da configuração da chave seletora do tubo de torpedo ( Einzelnschuß - na caixa de controle do subsistema de disparo ), o motor elétrico é controlado pelo indicador do ângulo de dispersão da salva (no caso de uma configuração de salva) ou pelo indicador de ajuste de zero (no caso de um único tiro). No segundo caso, o motor elétrico colocará o eixo na posição zero independentemente do ângulo de dispersão calculado, assim – no caso de um único disparo – o valor ψ = 0 será enviado para o receptor de ângulo giroscópico.
Desenho 30. Componente para cálculo do ângulo de dispersão da salva torpedo – indicador de ajuste de zero [1]
Deve-se notar que o componente para calcular o ângulo de espalhamento da salva de torpedos calcula o ângulo ψ entre os cursos dos torpedos que atingem a proa e a popa do alvo. O ângulo de dispersão real (final) (ângulo entre os cursos dos torpedos máximos na salva) depende do tamanho da salva e é calculado no receptor de ângulo do giroscópio .
O indicador da deflexão máxima da salva complementa o componente para calcular o ângulo de dispersão da salva torpedo. Este indicador foi introduzido porque os torpedos alemães, depois de deixarem o tubo, podiam fazer giros de até 90°. Havia situações possíveis em que o ângulo do giroscópio calculado estava próximo deste valor (digamos igual a 85°), enquanto o ângulo de dispersão era calculado como (por exemplo) 10°. Em tal situação, os ângulos do giroscópio para torpedos particulares na salva de quatro torpedos seriam os seguintes: 100°, 90°, 80° e 70° – ou seja, para um torpedo excederia o valor permitido. Para indicar tais situações, foi introduzido o indicador de deflexão máxima da salva. Consistia em três pares de misturas móveis, localizadas na borda do mostrador do giroscópio.

Foto 16. O indicador de deflexão máxima da salva
Os pares dessas blendas movimentaram-se independentemente, proporcionalmente aos valores 1,5ψ, ψ e 0,5ψ – aproximando-se e afastando-se da marca zero. O ângulo do giroscópio foi apontado pela marca ainda zero contra o mostrador treinável escalado na faixa de 0 a 360°. Uma barra transversal foi anexada ao mostrador treinável passando pelo centro do mostrador e valores de ângulo de 90° e 270° - indicava o ângulo máximo do giroscópio para torpedos. As misturas móveis revelaram o fundo vermelho sob elas. Se a barra se moveu para o fundo vermelho, significava que a salva de torpedos excedeu o ângulo giroscópio máximo permitido e a abordagem de ataque deve ser alterada.
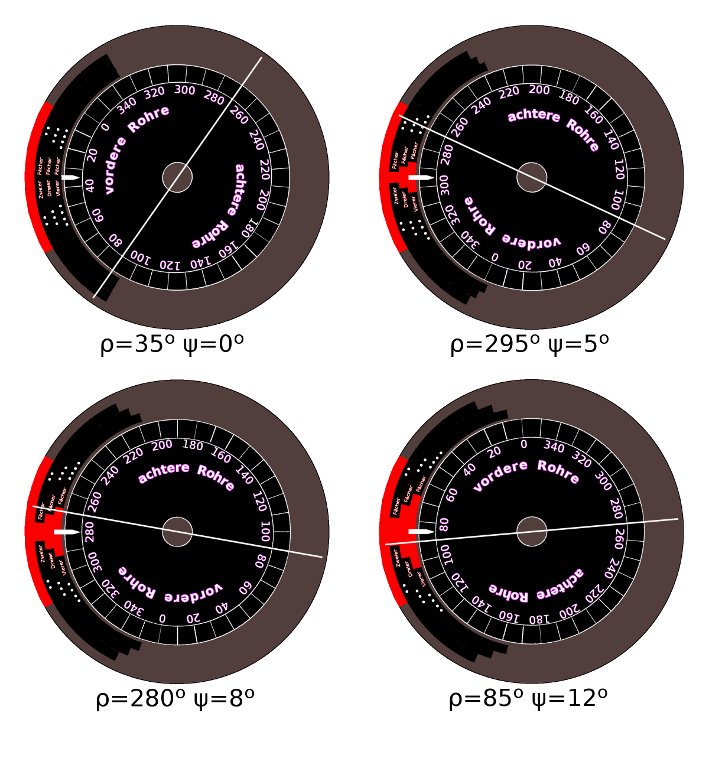
Desenho 31. Os indicadores de deflexão máxima da salva para vários valores do ângulo de dispersão e ângulo do giroscópio
Descrição do componente para inserir o rolamento alvo:
O rumo alvo ω – usado para cálculo da correção de paralaxe e ângulo do giroscópio – é transmitido para a calculadora por meio de um link selsyn. O receptor selsyn duplo recebeu a orientação de um dos três (UZO na ponte, periscópio de ataque na torre de comando e periscópio do céu na sala de controle) transmissores de orientação alvo (Germ. Ziel-Geber ) selecionados por meio da chave de seleção ( Zielrichtung ) na caixa de controle do subsistema de mira. Um indicador composto duplo com dois mostradores – um na faixa de 0 a 360° e outro na faixa de 0 a 10° foi integrado ao receptor.
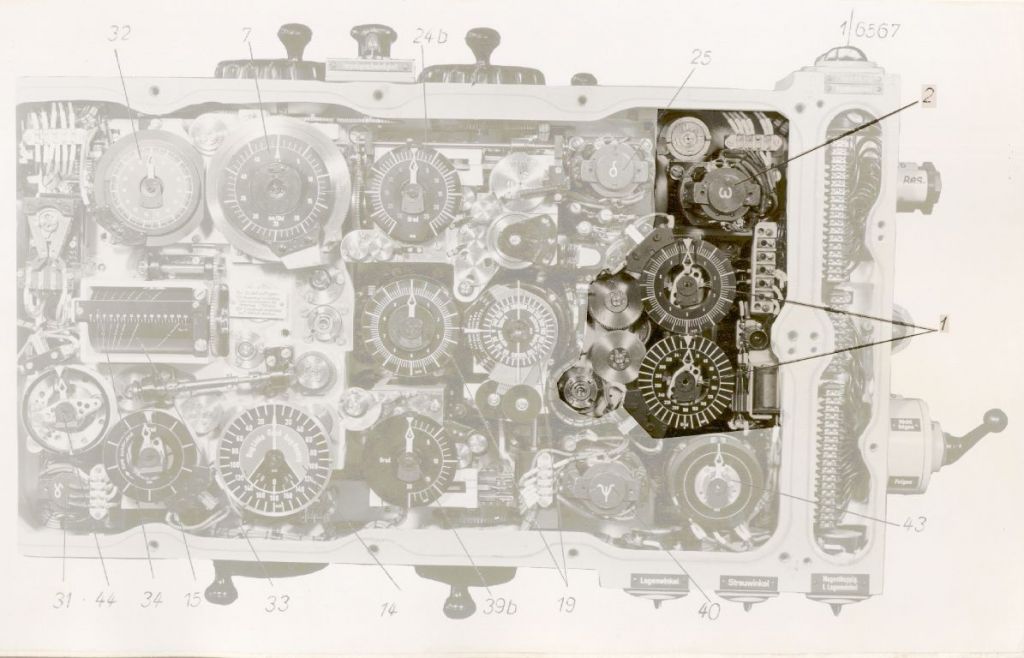
Foto 17. O componente para entrar no mancal alvo
(1) dial do mancal alvo
(2) motor do componente para entrar no mancal alvo
Cada mostrador foi equipado com dois ponteiros - um deles girava no eixo central e mostrava o valor recebido pelo receptor selsyn, enquanto o outro girava em torno da borda do mostrador e mostrava a configuração atual inserida na calculadora. A diferença na posição relativa desses ponteiros era o sinal de erro, que controlava um motor elétrico que acionava o eixo, passando o rolamento alvo recebido para os internos da calculadora (o próprio receptor selsyn não tem torque suficiente para acionar os internos da calculadora) .
Desenho 32. O componente para inserir o rolamento alvo [1]
Entre o mostrador composto e o motor elétrico havia um relé que era controlado por meio de um interruptor de acompanhamento ( Blauschalter ). Se liberado, o relé interrompeu a conexão entre o mostrador e o motor elétrico – o alvo atual do periscópio/UZO não alterou as configurações da calculadora. Quando a ordem “ Acompanhar o alvo ” ( Folgen! ) foi emitida, o interruptor de acompanhamento foi acionado e o relé conectou o mostrador ao motor elétrico, assim o rolamento do alvo atual foi inserido na calculadora. Esse recurso possibilitou a atualização do rumo alvo (quando a chave de acompanhamento estava na posição “ Folgen!”), mas quando foi necessário escanear todo o horizonte – para não alterar as configurações corretas da calculadora – a ordem “ não acompanhar alvo ” ( Blau! Nicht folgen! ) foi dada e o botão de acompanhamento foi liberado , e o relé desconectou o motor elétrico do mostrador.
Em caso de danos no motor elétrico ou nos links selsyn que transmitem o rolamento dos transmissores de rolamento para a calculadora, havia um botão para inserir o rolamento alvo manualmente. Este botão foi acoplado por meio da engrenagem diferencial com o eixo transmitindo o rolamento alvo para os internos da calculadora. Em tal situação, o operador da calculadora manualmente define o rumo do alvo verbalmente passado do oficial de torpedo (quando o link selsyn falhou) ou combinou as posições dos ponteiros nos mostradores (no caso de falha do motor elétrico).
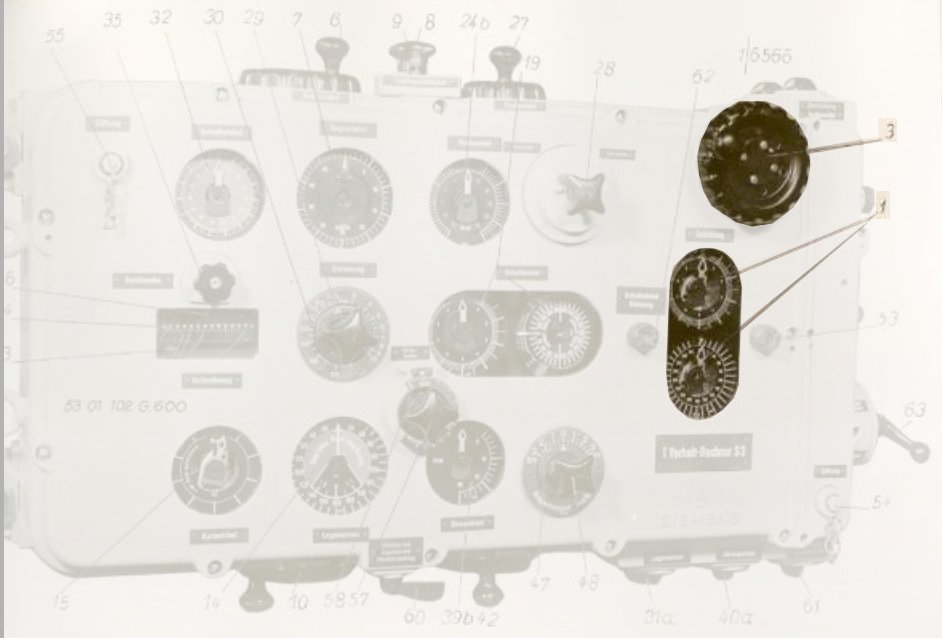
Foto 18. O mostrador do rumo alvo (1) e o botão (3)
O componente para entrar no rumo alvo também levou em consideração a correção da velocidade angular da curva do U-Boat. Esta correção foi relacionada ao atraso de partida do giroscópio torpedo, que foi igual a t v = 0,4 seg. Durante este tempo, o giroscópio do torpedo estava travado em uma posição. Isso significa que quando o U-Boat estava girando durante o lançamento do torpedo, o eixo longitudinal do torpedo (junto com o giroscópio travado) foi girado pelo ângulo \(t_{v}*\frac{φ}{t}\) , onde \(\frac{φ}{t}\) era a velocidade angular da curva, que dependia da velocidade do U-Boat e da deflexão do leme principal. , onde era a velocidade angular da curva, que dependia da velocidade do U-Boat e da deflexão do leme principal.
Rapidez [nós] | 30° | 15° | |
| ↑ | 17,5 | 2,5 | 1,8 |
| 12 | 1,7 | 1,25 | |
| ↓ | 8 | 1,4 | 1,0 |
| 4,5 | 0,85 | 0,6 |
Essa correção foi levada em consideração adicionando-a ao rolamento alvo. Foi inserido manualmente por meio do botão. A orientação do alvo resultante era ligeiramente diferente da orientação do alvo real, apresentada no mostrador da orientação do alvo.
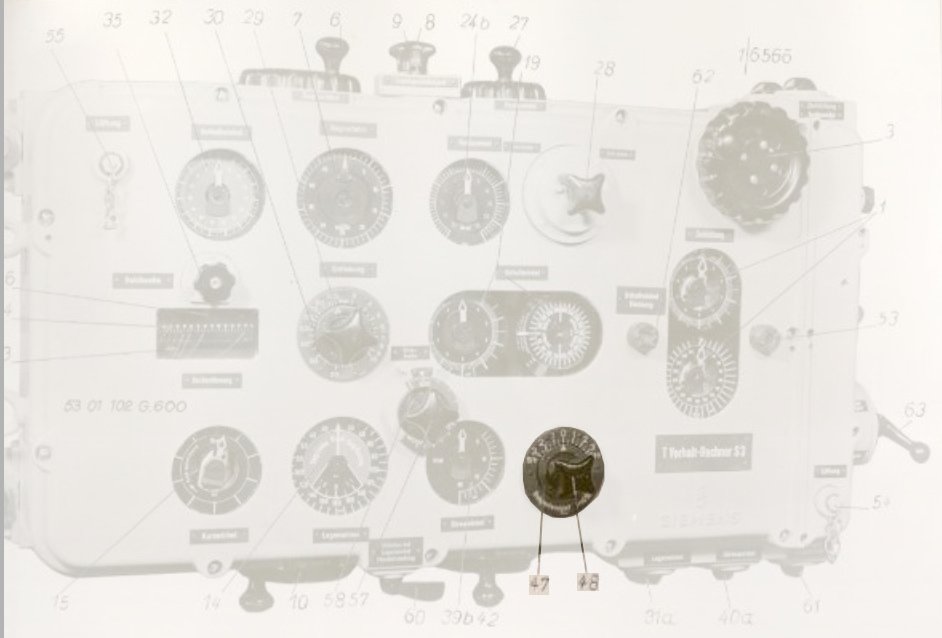
Foto 19. O botão (48) e o indicador (47) para inserir a correção da velocidade angular do giro
Descrição do componente para calcular o ângulo atual no arco:
Quando o alvo e o U-Boat estavam navegando em um curso constante, as mudanças dos rumos do alvo eram iguais às mudanças dos ângulos na proa.
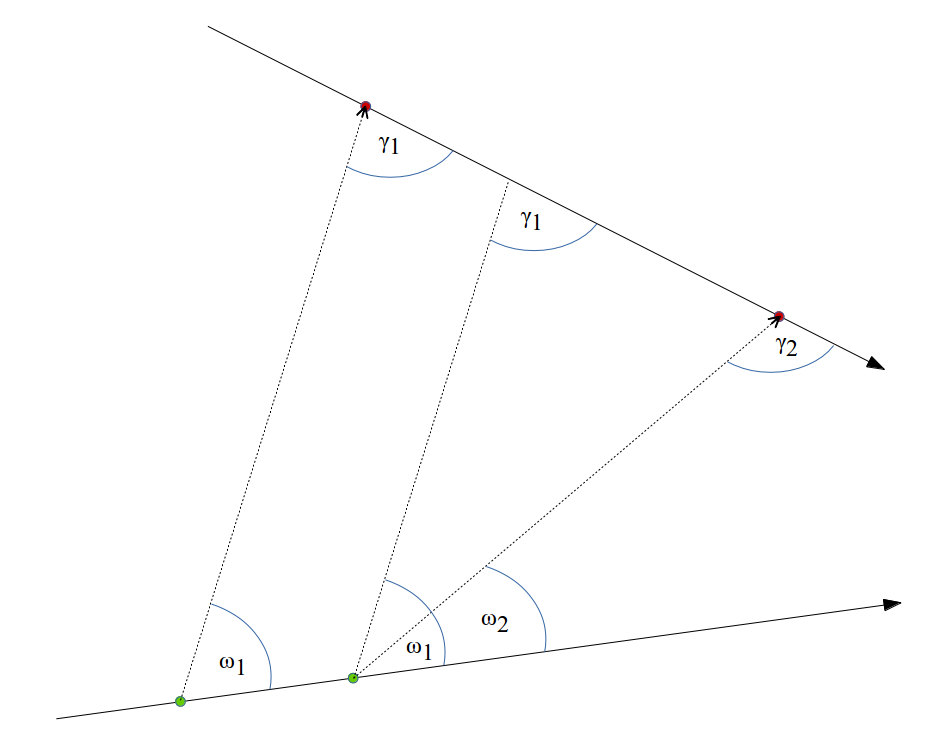
Desenho 33. A mudança do rumo do alvo e do ângulo na proa, enquanto navega em um curso constante
Em outras palavras, a diferença dos ângulos na proa e a diferença dos rolamentos do alvo era igual:
Δ = ω 1 – ω 2 e Δ = γ 1 – γ 2
Ele pode ser transformado no seguinte:
ω 1 – ω 2 = γ 1 – γ 2
isso é:
ω 1 – γ 1 = ω 2 – γ 2
Assim, em qualquer momento (assumindo um curso constante da própria embarcação e do alvo), a diferença da orientação do alvo e do ângulo na proa é constante.
Esse recurso foi utilizado no componente para cálculo do ângulo atual no arco, que atualizou o valor do ângulo no arco inserido inicialmente.

Desenho 34. O componente para calcular o ângulo de corrente no arco [1]
Este componente incluía o receptor selsyn, que recebia o valor do próprio curso φ e da girobússola. O valor do curso foi passado para uma das duas entradas do comparador. A segunda entrada do comparador recebeu a diferença entre o ângulo na proa γ e a orientação do alvo ω. Se o rumo do alvo (devido ao movimento do alvo) foi alterado, a diferença entre o rumo do alvo e o ângulo no arco também mudou. A alteração desta diferença foi comparada com o valor inalterado do próprio curso e gerou o sinal de erro, que controlava o motor elétrico, que através do diferencial alterou o ângulo na proa para restaurar o valor anterior da diferença entre o rolamento alvo e ângulo no arco.
Entre o próprio curso φ e receptor e o comparador havia um acoplamento eletromagnético, controlado pelo interruptor “ Ângulo atual na proa ” ( Lage laufend). Quando o acoplamento foi engatado, o valor do próprio curso foi passado para o comparador, e todo o componente automaticamente atualizou o ângulo na proa. Quando o acoplamento foi desengatado, o valor do próprio curso não foi repassado ao comparador. Nesse caso, o ângulo no arco pode ser atualizado manualmente por meio do botão. Em tal situação – devido ao acoplamento desengatado – o eixo de entrada do comparador pode girar em marcha lenta. Como os eixos de entrada dentro do comparador foram acoplados por meio da engrenagem diferencial, o eixo não carregado representando o valor do curso foi girado na mesma quantidade que o eixo representando a diferença do ângulo no arco e no mancal alvo. Portanto, apesar de alterar o valor da diferença do ângulo na proa e a orientação do alvo (devido à alteração manual do ângulo na proa), o sinal de erro produzido pelo comparador era zero e o motor elétrico atualizando o ângulo na proa estava desabilitado. Depois de terminar as atualizações manuais do ângulo na proa, o interruptor “Ângulo de corrente na proa ” foi acionado para engatar o acoplamento, conectando o receptor de curso com o comparador.
Deve-se notar que o componente para calcular o ângulo de corrente na proa também compensou as mudanças no rumo alvo resultantes das mudanças do próprio curso.
Se o próprio curso φ e foi alterado pelo valor Δ, significava que o rumo alvo também foi alterado pelo mesmo valor.
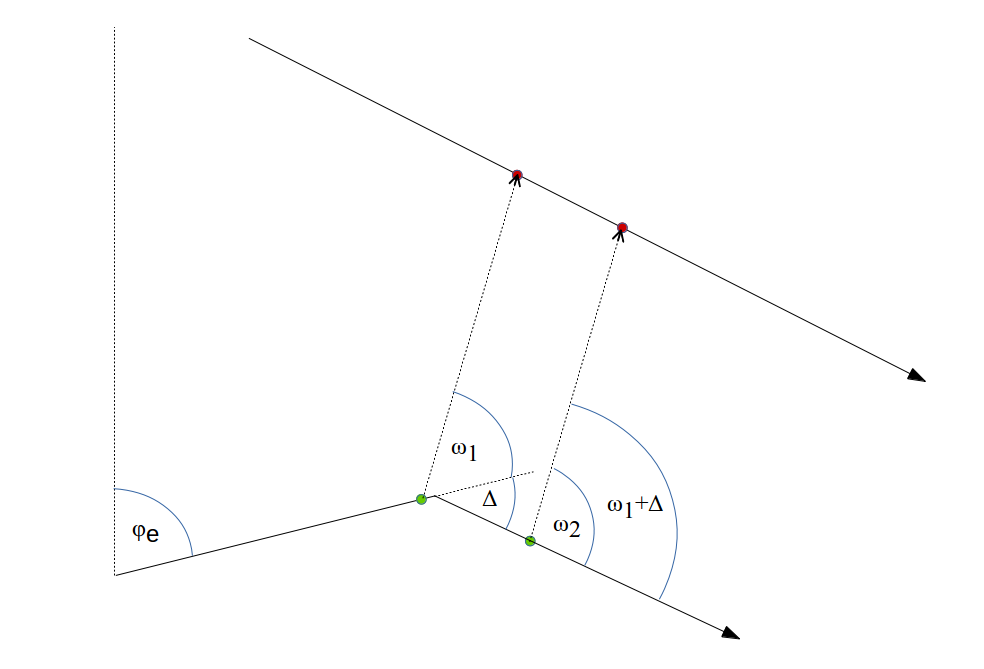
Desenho 35. Mudança de rumo devido a mudança de rumo próprio
Isso significa que ambos os valores (a diferença ω – γ e φ e ) passados para o comparador foram alterados pelo mesmo valor – o sinal de erro produzido pelo comparador foi zero – o motor elétrico atualizando o ângulo no arco foi desabilitado – e o ângulo na proa foi inalterado, além da mudança de rumo do alvo. O mostrador com a escala na faixa de 0 a 10° foi integrado ao comparador. Este mostrador mostrava a relativa mudança de rumo do U-Boat.

Foto 20. O componente para calcular o ângulo de corrente no arco
(15) próprio seletor de mudança de curso, (31) motor do componente para calcular o ângulo de corrente no arco
Deve-se notar que na calculadora de torpedos de U 955, o mostrador tem um alcance de até 60 e é rotulado como " Vorlf. sek. " que é " tempo da execução inicial (do torpedo) ". Isso é mais provável porque durante a reforma o mostrador original foi substituído por um mostrador sobressalente sem se importar que não fosse idêntico ao original. Este mostrador não está relacionado com a hora de forma alguma.
Descrição do componente para calcular o rumo alvo atual:
No caso de lançamento de salva, os torpedos eram disparados em sequência em intervalos de tempo iguais a 2,3 segundos (mais tarde na guerra esse intervalo foi alterado para ~8 segundos para evitar que as esteiras interferissem com os outros torpedos). Assim, o lançamento de uma salva de quatro torpedos (ou mesmo uma salva de seis torpedos no caso de U-Boats tipo XXI) levou de 9 a 14 segundos. Todo esse tempo – para manter o ângulo do giroscópio correto (que, entre outros, é a soma da orientação do alvo) – o periscópio/UZO tinha que estar apontado para o alvo. O oficial de torpedo tinha que estar focado o tempo todo na mira e, por razões táticas, isso não era desejado. É por isso que a calculadora foi equipada com o componente para calcular o rumo alvo atual.

Desenho 36. O componente para calcular o rumo alvo atual [1]
Este componente consiste em um comparador, ao qual uma entrada é conectada por meio do acoplamento eletromagnético com o próprio receptor de curso. A segunda entrada recebe o rumo alvo. O sinal de erro produzido pelo comparador pode ser conectado – por meio do relé – ao motor elétrico, acionando o eixo responsável pela entrada do mancal alvo para os internos do calculador.
O acoplamento eletromagnético e o relé são acionados no momento do acionamento da alavanca de disparo ( Abfeuerschalter ) – no momento do lançamento do primeiro torpedo da salva. Se o interruptor do subsistema de disparo ( Einzelnschuß ) estiver na posição “single shot” – o controle do acoplamento e do relé é desabilitado.
Desenho 37. O controle do componente para calcular o rolamento alvo atual [1]
No momento de acionar a alavanca de disparo (o lançamento do primeiro torpedo), o acoplamento eletroímã conectou o comparador com o próprio receptor de curso e o sinal de erro produzido pelos controles do comparador (em vez do sinal de erro do mostrador do rolamento alvo) e o motor elétrico acionando o eixo, responsável por inserir o rolamento alvo nos internos da calculadora. Ou seja, desde este momento, o rumo apontado pelo periscópio/UZO não tem influência nas configurações da calculadora. Além disso, o U-Boat pode virar durante o disparo de salva – a mudança de rumo resultante da mudança de curso é compensada e o ângulo do giroscópio será atualizado. Como no circuito não há relé de travamento, a alavanca de disparo deve ser empurrada até o lançamento do último torpedo da salva (que é sinalizado notabela de lâmpadas de controle de torpedo ).
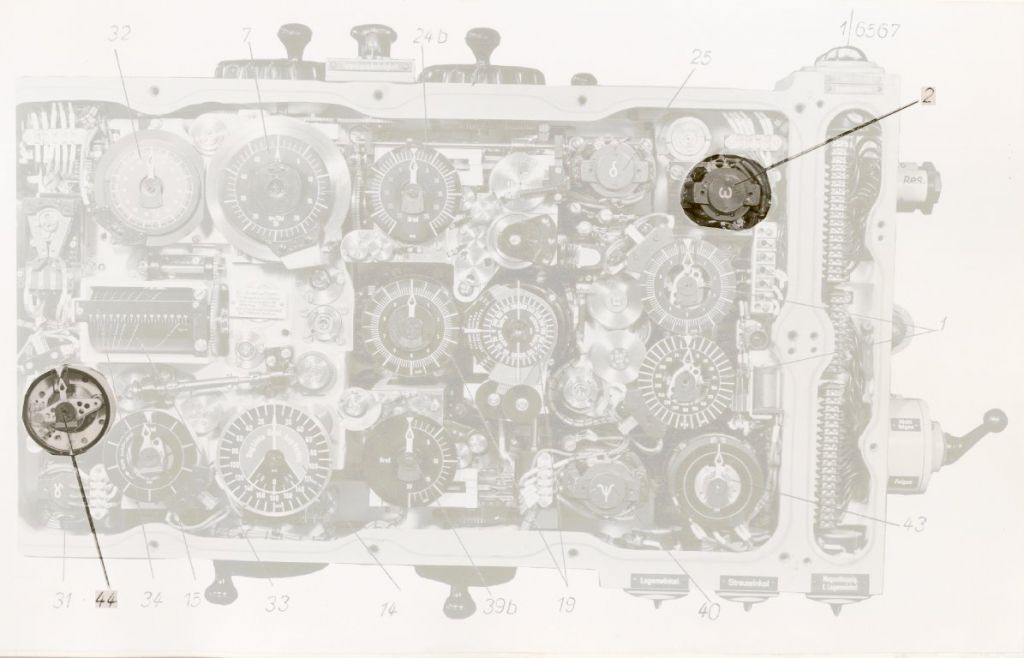
Foto 21. O componente para calcular o rolamento alvo atual
(2) motor do componente para entrar no rolamento alvo
(44) comparador do componente para calcular o rolamento alvo atual
Referências:
[1] Die Torpedos der deutschen U-Boote, Eberhard Rössler
Nenhum comentário:
Postar um comentário
Observação: somente um membro deste blog pode postar um comentário.